STM32F103控制的自动往返电动小车设计
版权申诉
55 浏览量
更新于2024-06-29
1
收藏 849KB PDF 举报
"这篇设计报告详细介绍了基于STM32微控制器的自动往返电动小汽车的实现,涵盖了硬件设计、软件算法以及控制策略。报告中提到,小汽车利用反射式红外传感器检测路面黑线,通过PWM技术调整电机转速,实现精确控制。模糊控制算法与PWM相结合,提升了位置控制精度并实现恒速行驶。此外,小车还能记录往返时间和行驶距离,具备急刹车、调速、倒车返回等功能,并有蜂鸣器提示。STM32F103作为核心控制器,因其丰富的资源、高性能和低功耗特性,成为该应用的理想选择。报告还提及了Cortex-M3内核的优势,以及STM32系列在嵌入式领域的广泛应用。"
这篇设计报告围绕STM32微控制器在自动往返电动小汽车控制系统中的应用展开。首先, STM32F103作为主控芯片,是基于ARM公司的Cortex-M3内核,具有高性能、低功耗、丰富的外设和高性价比等特点。报告详细阐述了小汽车的控制系统设计,其中传感器部分采用了反射式红外传感器来检测路面黑线,从而实现小汽车的路径跟踪。电机控制则依赖于PWM(脉宽调制)技术,通过动态调整PWM信号的占空比来控制电动机的转速,以实现调速、急刹车和停车等操作。
软件控制层面,模糊控制算法被引入,它与PWM技术相结合,提高了小车在行驶过程中的位置控制精度,确保了在限速和压线情况下的精确控制。此外,小车还具备自动记录往返时间和行驶距离的功能,并通过蜂鸣器提醒用户。MATLAB仿真实现了平稳的调速过程,从最高速度到低速的过渡更加平滑。
整个系统的设计充分体现了STM32微控制器的灵活性和强大功能,适用于各种自动化控制应用,特别是在汽车电子、工业控制、医疗器械和玩具等领域。STM32F103的广泛应用和良好性能,使得它成为了智能小车控制系统的一个理想选择。通过这一项目,展示了嵌入式系统如何借助先进的微控制器技术实现复杂控制任务,同时展现了模糊控制理论在实时控制问题上的优势。
运算、处理能力,来实现小车自动识别路线按迹行走、躲避障碍物,并且通过
LCD 显示器实时显示小车运动参数;配置 STM32F103 通用定时器为 PWM 输出
模式产生 PWM 波,通过步进调节 PWM 波占空比参数控制电机的转速。
第一章 系统方案论证与分析
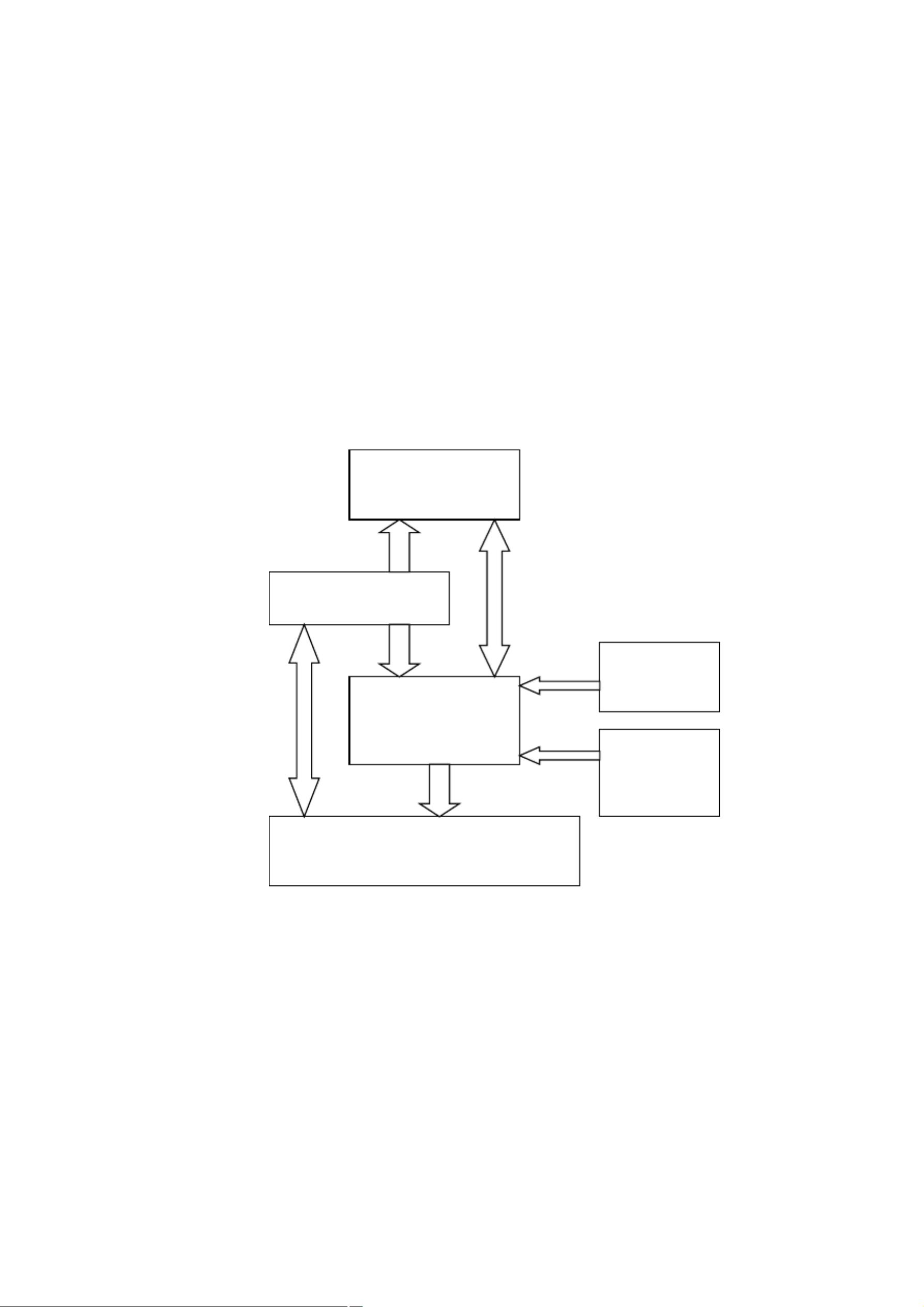
根据题目中的设计要求,本系统主要由主控单片机模块、电源模块、电机驱
动模块、黑线检测模块、测速模块以及液晶显示模块构成。本系统的方框图如下
图所示:
L298 电机驱动芯片
电源模块
测速模块
STM32
黑 线 检 测 模
块
TFT 显示
1、 主控单片机
根据题目要求,控制器主要用于控制电机的运动,黑线的检测以及相关信息
的显示。对于控制器的选择主要有以下两种方案:
方案一:采用 51 系列单片机作为控制器。51 系列单片机应用广泛,技
术成熟,但是运行速度慢,内部资源较少,且只有2 个定时计数器,不满足题目
要求。
方案二:采用 STM32 作为控制器。基于 Cortex- M3 内核的 STM32F10x 系
列芯片是新型的 32 位嵌入式微处理器,其性能优良,移植性好,提高了对直流
1
剩余14页未读,继续阅读
1296 浏览量
6150 浏览量
1940 浏览量
5315 浏览量
2120 浏览量
2766 浏览量

G11176593
- 粉丝: 6947
 我的内容管理
展开
我的内容管理
展开







最新资源
- JAD工具:Java反编译神器的实用教程
- Delphi多线程控件BmdThread_1.9的安装与测试指南
- Flash猜拳游戏源码分享 - 剪刀石头布
- Java编程课程中辐射监测任务1解析
- 深入探究ASP.NET同学录系统设计与实践
- Windows Server 2003双机热备技术实施教程
- 掌握kindeditor使用技巧,实例操作解析
- mimos:打造hapi生态系统的Mime数据库界面
- JqGrid在VS2010和MVC下的应用示例
- C#实现USB HID设备通信的方法及实例
- YangDiDi-bilibili.github.io网站CSS技术解析
- Eclipse贪吃蛇游戏插件简易安装指南
- MATLAB实现:非线性方程组的无导数解算器开发
- 揭秘:超级玛丽游戏源码的神秘面纱
- Scribd文档去划线解决方案及开发指南
- 单片机红外线控制数码管显示与蜂鸣器
