手写字符识别的进展与几何变换方法
需积分: 10 153 浏览量
更新于2024-07-19
收藏 11.61MB PDF 举报
"《Advances in Character Recognition》是由Xiaoqing Ding编辑的一本书,集结了多位贡献者在字符识别领域的研究成果。这本书探讨了在模式识别,特别是手写字符识别中的挑战,以及如何设计有效的分类函数来区分同一类别内的不相关变异性,并识别不同类别的有意义差异。书中提到了两种方法,一种是存储大量原型实例进行匹配,另一种是使用几何变换生成单一原型的变形实例以适应输入的数字模式,其中Lie算子的概念被应用到几何变换中。这本书的开放访问章节允许用户下载、复制和基于文章内容进行构建,只要作者和出版社得到适当引用,这有助于知识的广泛传播和影响。"
字符识别是一种在图像处理和机器学习领域中的关键技术,它涉及将手写或打印的字符转化为计算机可理解的数字形式。在《Advances in Character Recognition》中,作者们深入讨论了这个主题,特别是在手写数字识别方面的挑战。一个关键问题是如何构建一个高效的分类系统,这个系统能够对同一类别的字符进行归类,同时能够识别出不同类别的特征。
传统的字符识别方法可能需要存储每个类别的多种实例(如不同大小、角度、倾斜等)作为原型,然后通过某种距离度量标准去匹配输入的字符模式。这种方法虽然直观,但可能导致存储需求过大,从而影响系统的效率和实用性。为了解决这个问题,书中提出了使用单个原型并利用几何变换的方法。这种方法仅需一个代表性的模板,通过Lie算子执行如加粗、旋转等操作,生成各种变形的实例,以便最优化地匹配输入的字符模式。Lie算子是一种数学工具,它允许对连续群(如旋转、缩放)进行线性化处理,使得字符的变形能够更灵活地被建模和匹配。
此外,书中还涵盖了其他贡献者的工作,包括但不限于神经网络、深度学习模型、特征提取技术以及在实际应用中的字符识别算法。这些研究可能涉及提高识别准确性、降低错误率、减少计算复杂度等方面,以推动字符识别技术的进步。
《Advances in Character Recognition》为读者提供了当前字符识别领域的前沿理论和实践方法,对于研究人员和工程师来说,是一份宝贵的参考资料,有助于他们理解并解决字符识别中的复杂问题,推动相关技术的发展。
8 Character Recognition
Transformation
Transformation matrix T
θ
Lie operator and
(adapted from [18]) the transformed image
Rotation (R)
cos θ,
−
sin θ
sin θ, cos θ
L
R
=
y
∂
∂x
−
x
∂
∂y
I
R
=
I
+
θ
×
L
R
(
I
)
Scaling (S)
1
+
θ,0
0, 1
+
θ
L
S
=
x
∂
∂x
+
y
∂
∂y
I
S
=
I
+
θ
×
L
S
(
I
)
Scaling (S
x
)
1
+
θ,0
0, 1
L
S
x
=
x
∂
∂x
I
S
x
=
I
+
θ
×
L
S
x
(
I
)
Scaling (S
y
)
1, 0
0, 1
+
θ
L
S
y
=
y
∂
∂y
I
S
y
=
I
+
θ
×
L
S
y
(
I
)
Parallel Deformation ( P)
1
+
θ,0
0, 1
−
θ
L
P
=
x
∂
∂x
−
y
∂
∂y
I
P
=
I
+
θ
×
L
P
(
I
)
Diagonal Deformation (D)
1, θ
θ,1
L
D
=
y
∂
∂x
+
x
∂
∂y
I
D
=
I
+
θ
×
L
D
(
I
)
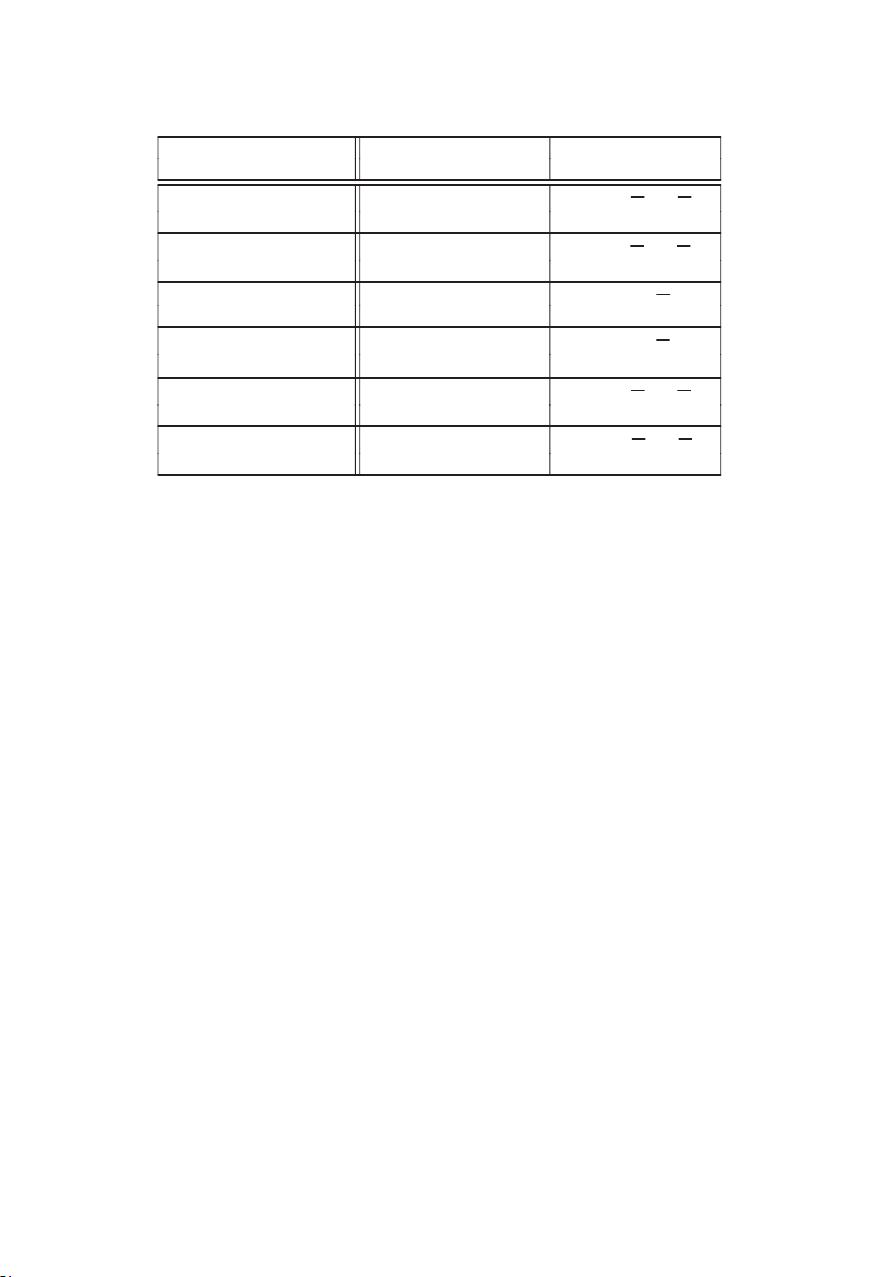
Table 1. Six types of transformation and their associated Lie operators (θ is the degree of the
transformations).
We can see from (32) that only simple subtractions and multiplications are involved in
applying the Lie operator to o btain L
R
(
I
)
, which needs to be calculated just once, since a
different transformed version I
R
corresponding to a different degree of transformation (θ) can
be obtained by using the same L
R
(
I
)
. Therefore, the implementation of Lie operators has
fairly low computational complexity.
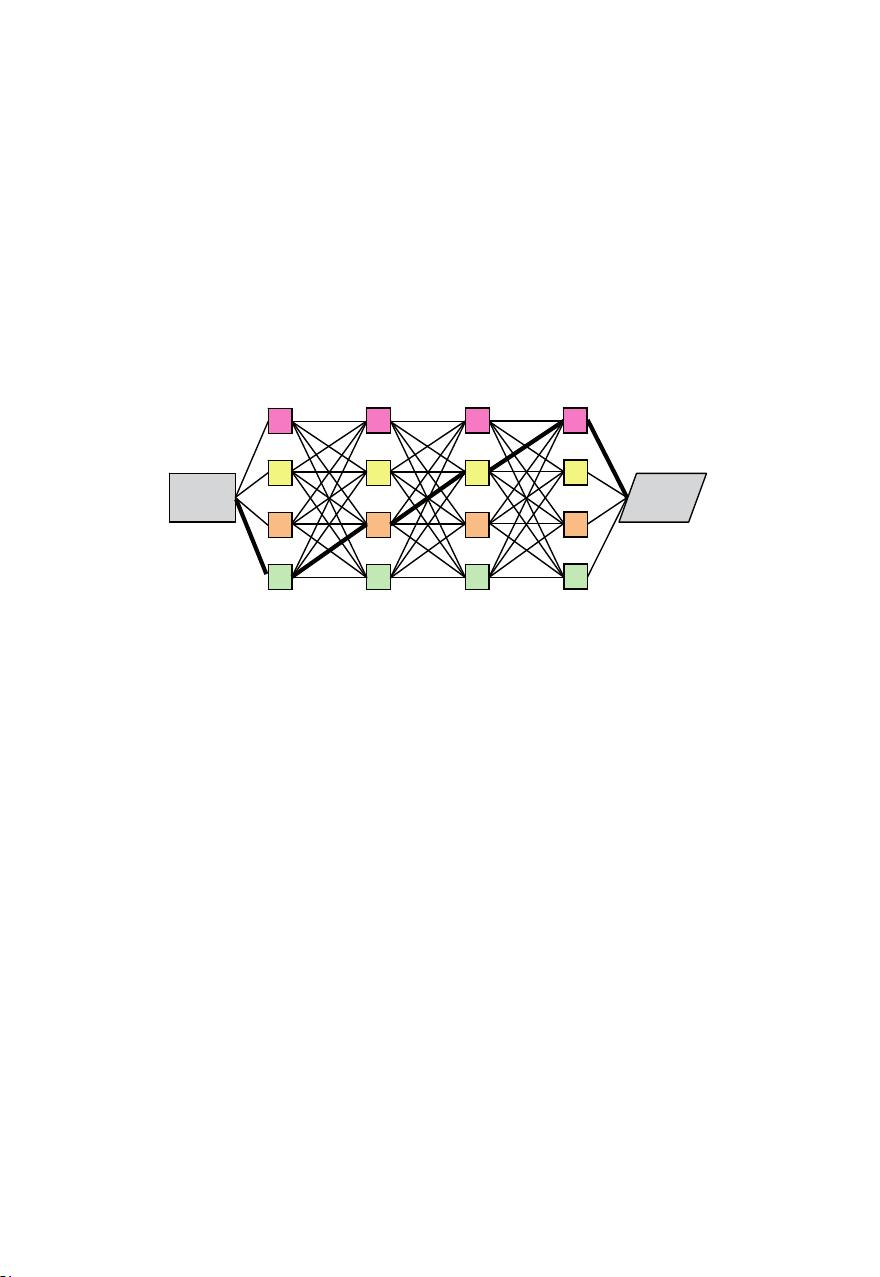
2.4. Li e operators for transformation estimation
Lie operators were p roposed in [18] as an effective method for handling transform ation
invariance in handwritten digit pattern recognition [19]. In order for an automatic method to
“recognize” a handwritten digit, the inco ming digit pattern needs to be accurately classified
into one out of ten possible categories. one method is to use an only one prototype image (I)
for each category, with different “deform ed” instances, s
(
I, Θ), of the same prototype image
being generated by ge ometric transformations dur ing the matching proc ess so as to best fit
the incom ing digit pattern. As mentioned in the section 1, when the set of transformations
is parameterized by m parameters θ
i
∈
Θ (rotation, scaling, etc.), the transformed image
s
(
I, Θ) is a surface (manifold) with intrinsic dimension of at most m. In general, such a
manifold is not linear. Matching a defo rmable prototype to an incoming pattern now amounts
to finding the po int on the manifold that is at a minimum d istance from the point in the
pixel space correspond ing to the inco ming pattern. Be cause the manifold has no analytical
expression, the matching process can be very difficult. However, if the set of transformations
happens to be linear in the pixel space, then the manifold is a linear subspace (a plane).
The matching procedure is then reduced to finding the shortest distance between a point
(vector) and a plane, or between two tangent planes corresponding to their original manifolds,
which is the idea of tangent distance in [18]. While the tangent d istance is able to capture the
transformation invariance, it involves solving of a complicated least-square problem, which is
not only computationally ex pensive, but also prone to numerical instability issues associated
with solving linear systems. The refore , conventional Euclidean distance between patterns,
8
Advances in Character Recognition



剩余239页未读,继续阅读
2024-07-25 上传
2010-03-24 上传
2023-02-17 上传
2023-03-16 上传
2023-09-17 上传
2023-10-21 上传
2023-10-10 上传
2023-03-16 上传
2023-09-09 上传
2023-05-15 上传

mxyzptlk
- 粉丝: 0
- 资源: 10
 我的内容管理
展开
我的内容管理
展开







最新资源
- 前端面试必问:真实项目经验大揭秘
- 永磁同步电机二阶自抗扰神经网络控制技术与实践
- 基于HAL库的LoRa通讯与SHT30温湿度测量项目
- avaWeb-mast推荐系统开发实战指南
- 慧鱼SolidWorks零件模型库:设计与创新的强大工具
- MATLAB实现稀疏傅里叶变换(SFFT)代码及测试
- ChatGPT联网模式亮相,体验智能压缩技术.zip
- 掌握进程保护的HOOK API技术
- 基于.Net的日用品网站开发:设计、实现与分析
- MyBatis-Spring 1.3.2版本下载指南
- 开源全能媒体播放器:小戴媒体播放器2 5.1-3
- 华为eNSP参考文档:DHCP与VRP操作指南
- SpringMyBatis实现疫苗接种预约系统
- VHDL实现倒车雷达系统源码免费提供
- 掌握软件测评师考试要点:历年真题解析
- 轻松下载微信视频号内容的新工具介绍
