"基于ROS的移动机器人路径规划算法仿真研究"
本次毕业论文围绕基于ROS的移动机器人路径规划算法仿真展开,主要目标是构建仿真框架和环境,分析路径规划算法原理并实现,最终利用ROS路径规划插件实现仿真。具体实验中使用双轮差速驱动机器人作为仿真模型,实现小车的自主导航。论文内容主要包括遗传算法Matlab仿真和ROS仿真使用A*、遗传算法和DWA等算法。整个论文分为四章,首先介绍了移动机器人和路径规划算法的研究背景、意义和设计目标,然后阐述了ROS下移动机器人的运行环境,紧接着详细介绍了应用的遗传算法原理和matlab仿真分析,最后展示了ROS下路径规划算法的最终调试结果。
随着机器人技术的快速发展,移动机器人在现代社会扮演着越来越重要的角色。为了实现机器人在不同环境中的自主导航能力,路径规划算法成为了至关重要的技术。本论文选择了ROS作为软件平台,并采用双轮差速驱动机器人作为仿真模型,以实现小车的自主导航。与传统的路径规划算法不同,本研究尝试应用现代路径规划算法——遗传算法,从而提高机器人的导航效率和灵活性。
在论文中,第一章介绍了移动机器人和路径规划算法的研究背景,探讨了本次设计的目标和意义。第二章详细阐述了ROS下移动机器人的运行环境,包括ROS的基本概念和功能以及如何搭建开发环境。第三章重点介绍了应用的遗传算法的原理和matlab仿真分析,通过具体的算法原理和仿真结果展示了遗传算法在路径规划中的应用潜力。最后一章展示了ROS下路径规划算法的最终调试结果,比较了A*、遗传算法和DWA等不同算法的性能指标,验证了遗传算法在移动机器人路径规划中的有效性和优势。
综上所述,本文通过对基于ROS的移动机器人路径规划算法仿真的研究和实验,为提高移动机器人自主导航能力提供了新的思路和方法。通过ROS路径规划插件的应用,实现了对小车的自主导航,为机器人在复杂环境中的智能行为提供了技术支撑。遗传算法作为一种现代路径规划算法,在移动机器人的路径规划中具有广阔的应用前景。这一研究成果将对移动机器人领域的发展产生积极影响,推动机器人技术的进一步发展和应用。
- 7 -
x
x
ICC 点坐标:
ICC
=
[ICC
x
, ICC
y
]
=
[x
−
R sin
, y
+
R sin
]
公式 2.5
移动 Δt 时间后的朝向角:
'
=
t +
公 式 2.6
实际应用中𝑉
𝑙
和𝑉
𝑟
难以精确测量,他们通过里程计数据计算而得:
V =
n step
公 式 2.7
t
因此会得到:
R =
L(n
l
+ n
r
)
公 式 2.8
2(n
l
− n
r
)
t =
(n
l
+ n
r
) step
公 式 2.9
L
由此会得到 Δt 时间后的位姿为:
x
'
cos(
t) −sin(
t) 0
x − ICC
ICC
y
'
= sin(
t) cos(
t) 0 y − ICC + ICC
公式 2.10
y
y
z
'
0 0 1
t
优点:机械结构简单、运动控制灵活。通常小车两个差速轮直接与电动机相连。缺
点:差速机器人很难走好一条直线。因为两个驱动轮是独立的,一旦两侧的运
动速度不是精确相同的话,机器人就会向一边偏离。像这种电动机轻微的速度差异、
马达驱动系统的摩擦力差异以及轮子与地面的摩擦力差异,实现驱动轮电动机旋转速
率精准相等是很不容易的。为了保证机器人直线运动,有必要频繁调整电动机的
RPM(每秒多次),但在仿真的理想环境中这种模型是符合要求的。
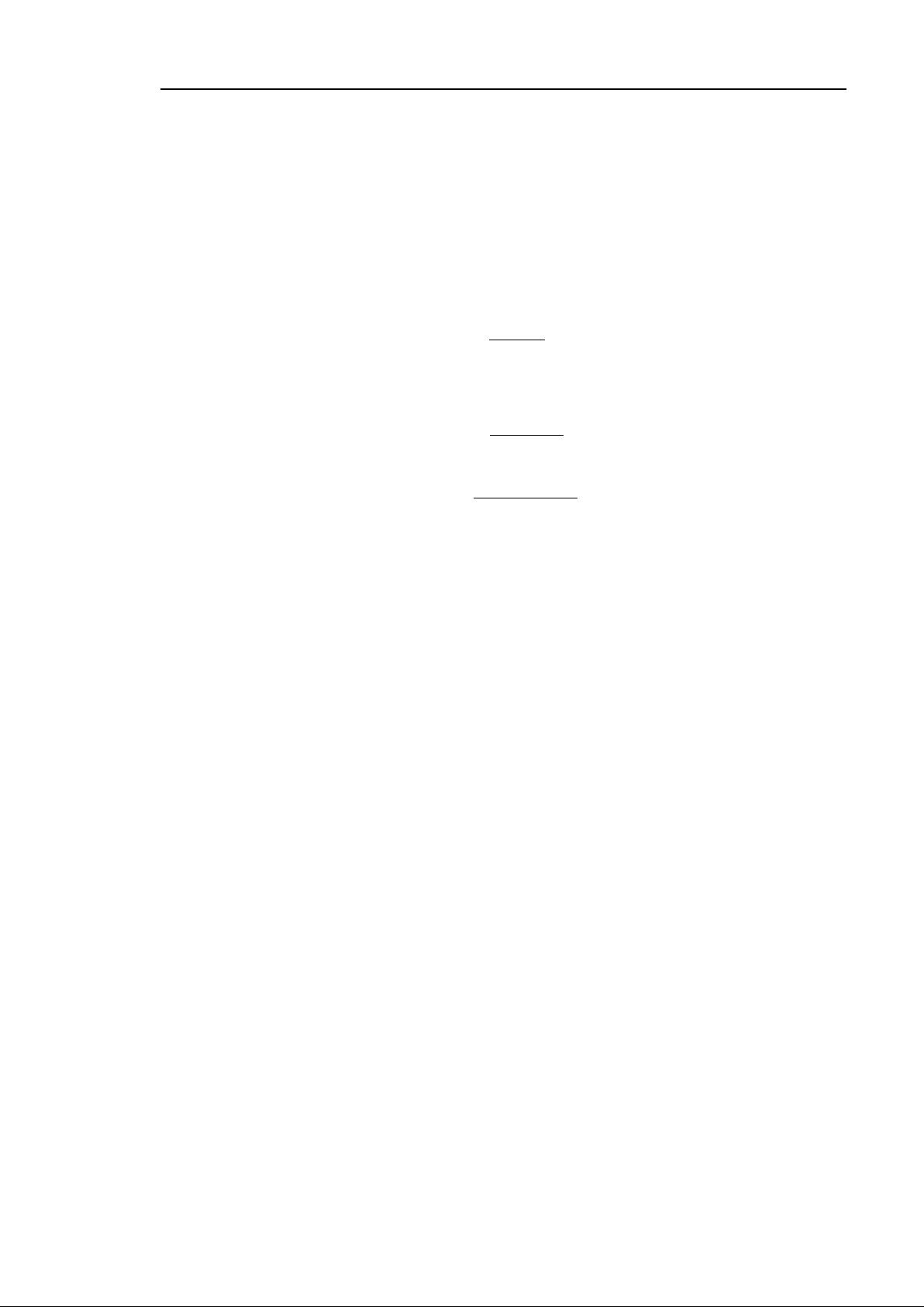
2.1.2 机器人模型框架构建
URDF(Unified Robot Descrition Format,统一机器人描述格式),是 ROS 中一
个被广泛采纳的机器人描述格式,为了解析使用 URDF 文件中使用 XML 格式描述的
机器人模型,ROS 提供了 URDF 文件的 C++解析器。同时,另外一种机器人模型描
述形式——xacro,它是精简版的 URDF 文件,是针对 URDF 模型产生的另外一种精
简化、可复用、模块化的描述形式。在 xacro 中,可以通过创建宏定义的方式定义常
量或者复用代码,不仅可以减少代码量,而且让模型代码更加模块化,具有更高的可
读性。xacro 的语法支持一些可编程接口,如常量、变量、数学公式、条件语句等,
可以让建模过程更加智能有效。
剩余36页未读,继续阅读
2010-07-18 上传
2024-01-02 上传
2024-06-27 上传
2021-08-14 上传
2021-08-12 上传
2021-08-14 上传
2021-08-14 上传

daxia_lv
- 粉丝: 6
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 全国江河水系图层shp文件包下载
- 点云二值化测试数据集的详细解读
- JDiskCat:跨平台开源磁盘目录工具
- 加密FS模块:实现动态文件加密的Node.js包
- 宠物小精灵记忆配对游戏:强化你的命名记忆
- React入门教程:创建React应用与脚本使用指南
- Linux和Unix文件标记解决方案:贝岭的matlab代码
- Unity射击游戏UI套件:支持C#与多种屏幕布局
- MapboxGL Draw自定义模式:高效切割多边形方法
- C语言课程设计:计算机程序编辑语言的应用与优势
- 吴恩达课程手写实现Python优化器和网络模型
- PFT_2019项目:ft_printf测试器的新版测试规范
- MySQL数据库备份Shell脚本使用指南
- Ohbug扩展实现屏幕录像功能
- Ember CLI 插件:ember-cli-i18n-lazy-lookup 实现高效国际化
- Wireshark网络调试工具:中文支持的网口发包与分析
