雷达物位计软件算法详解:从信号处理到回波跟踪
115 浏览量
更新于2024-08-04
1
收藏 469KB DOCX 举报
本文档详细介绍了雷达物位计的软件算法,包括法兰距离计算、信号加窗、信号补零、FFT运算、频谱峰值探测、回波筛选、谱估计、回波跟踪以及滤波处理等多个关键步骤。
1. 法兰距离计算:在雷达物位计的测量中,法兰距离是一个重要的参数,它涉及到实际物位与雷达天线之间的物理距离。计算法兰距离有助于精确确定被测物体的位置。
2. 信号加窗:加窗技术用于减少频谱泄露,文中提到了三种常用的窗函数——矩形窗、汉宁窗和布莱克曼窗。通过窗函数与中频信号进行点乘运算,可以改善信号的质量,减少旁瓣效应。
3. 信号补零:信号补零是一种扩展信号长度的技术,将原有的1199点信号扩展到4096点,这样在进行FFT运算时可以提高频率分辨率。
4. FFT运算:对补零后的信号执行实数快速傅里叶变换(FFT),得到频谱信息。TMS320F28335芯片提供了RFFT_f32()和RFFT_f32_mag()库函数来实现这一过程。
5. 频谱峰值探测:通过MATLAB的PeakFinder算法思路,找出频谱中的波峰,这些波峰可能对应于雷达反射的回波。
6. 回波筛选:有效回波需满足特定的位置和幅值条件,如位于盲区和罐底之间,且幅度超过预设阈值。这一步骤用于去除噪声和无效信号。
7. 谱估计:对筛选出的回波进行二次曲线拟合,估算回波的实际位置和幅度,进一步提高测量精度。
8. 回波跟踪:根据所选算法(首回波或回波搜索),建立状态机模型来追踪最相关的回波,输出液面状态、位置和幅度信息。
9. 滤波处理:提供了跳跃滤波、阻尼和最小二乘法滤波三种方法,用于平滑信号,消除噪声,提升测量稳定性。其中,阻尼和最小二乘法滤波不能同时使用,但跳跃滤波可以与其他方法结合。
这些算法和步骤构成了雷达物位计的核心软件处理流程,旨在实现准确、稳定和高效的物位测量。在工业应用中,这种技术常用于监控储罐、仓库或其他容器内的物料水平,确保过程控制的准确性和安全性。
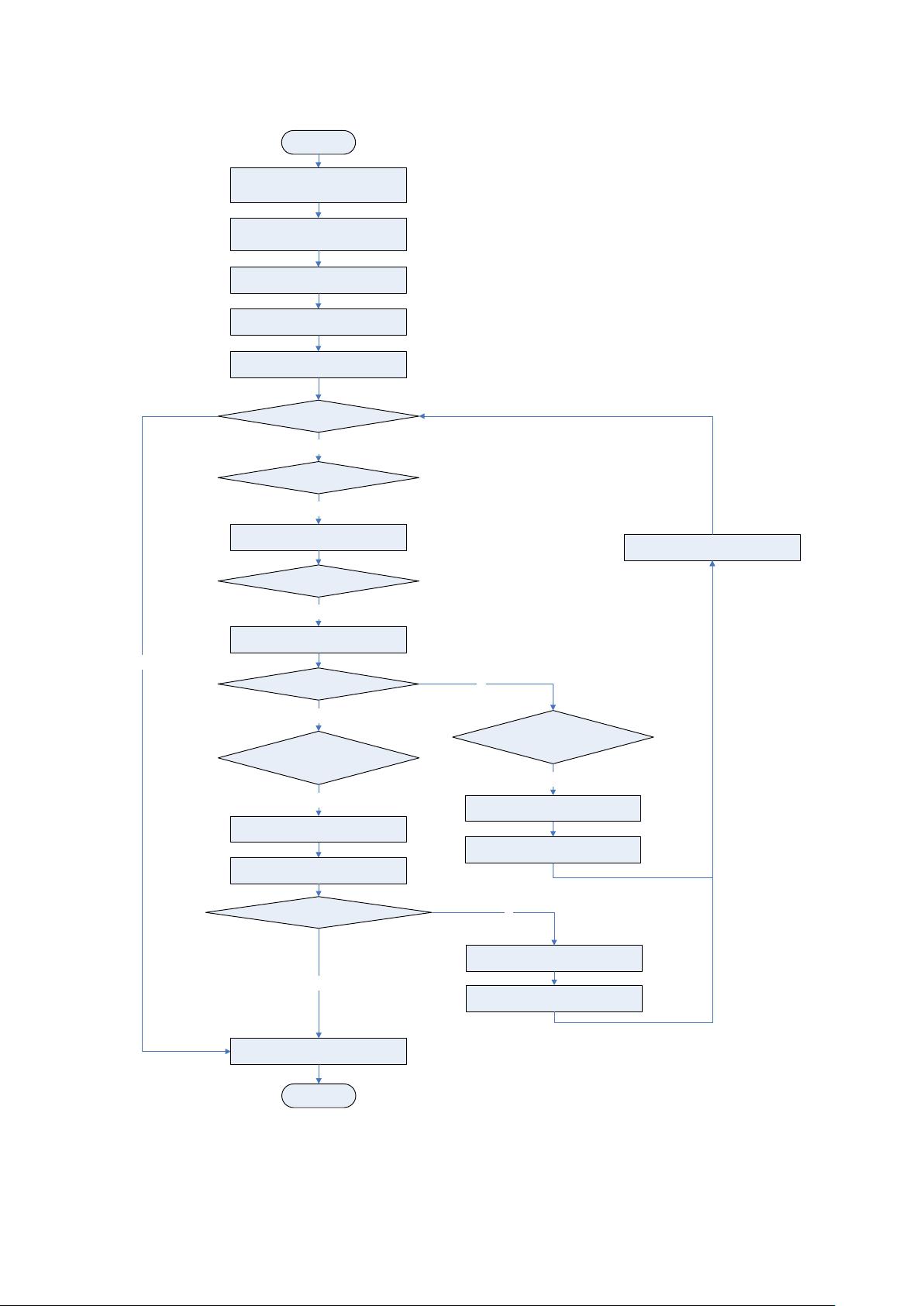
设置从波峰开始的最小值为频谱
数组Y[M]首值Y[0]
设置频谱数组迭代游标i=1
开始
设置从波谷开始的最大值为频谱
数组Y[M]的首值Y[0]
i<M?
结束
N
Y
设置当前正在查找波峰
设置波峰计数器N=0
Y[i]>从波谷开始的最大值?
设置从波谷开始的最大值为Y[i]
Y
Y[i]<从波峰开始的最小值?
设置从波峰开始的最小值为Y[i]
Y
当前正在查找波峰?
Y[i]<从波谷开始的最大值一定
阈值量?
Y
记录找到的波峰索引
Y
波峰计数器N加1
N大于等于波峰索引数组大小?
设置从波峰开始的最小值为Y[i]
N
设置当前正在查找波谷
Y[i]>从波峰开始的最小值一定
阈值量?
N
设置从波谷开始的最大值为Y[i]
设置当前正在查找波峰
Y
i++
返回波峰计数器N
Y
频谱峰值探测的输出为波峰索引数组。
剩余13页未读,继续阅读
2023-02-27 上传
2021-09-26 上传
2021-06-15 上传
2022-01-23 上传
2023-02-27 上传
2022-07-11 上传
2019-07-10 上传
点击了解资源详情
2022-11-28 上传

zzzzl333
- 粉丝: 790
- 资源: 7万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- WordPress作为新闻管理面板的实现指南
- NPC_Generator:使用Ruby打造的游戏角色生成器
- MATLAB实现变邻域搜索算法源码解析
- 探索C++并行编程:使用INTEL TBB的项目实践
- 玫枫跟打器:网页版五笔打字工具,提升macOS打字效率
- 萨尔塔·阿萨尔·希塔斯:SATINDER项目解析
- 掌握变邻域搜索算法:MATLAB代码实践
- saaraansh: 简化法律文档,打破语言障碍的智能应用
- 探索牛角交友盲盒系统:PHP开源交友平台的新选择
- 探索Nullfactory-SSRSExtensions: 强化SQL Server报告服务
- Lotide:一套JavaScript实用工具库的深度解析
- 利用Aurelia 2脚手架搭建新项目的快速指南
- 变邻域搜索算法Matlab实现教程
- 实战指南:构建高效ES+Redis+MySQL架构解决方案
- GitHub Pages入门模板快速启动指南
- NeonClock遗产版:包名更迭与应用更新
