台达C2000_PLUS高性能矢量变频器:创新力与专业服务解析
版权申诉
台达高性能矢量控制变频器C2000_PLUS是一款专注于工业自动化领域的高端产品,它专为感应电机和永磁同步电机提供精准的控制解决方案。该变频器系列采用先进的矢量控制技术,能够实现高精度的速度、转矩和位置控制,使得电机性能得以显著提升,尤其适合在生产、加工、食品、化工、金属、橡塑、市政基础设施等广泛的工业应用场景中使用。
C2000_PLUS系列相较于前一代产品有着显著的进步,其过载能力得到了大幅度增强,特别是460 V型号的最高功率段可以达到惊人的560 kW,这使其在处理重型定转矩负载时表现出色,提供了卓越的性能和稳定性。这表明这款变频器具有极高的适应性和耐用性,能够在高负载条件下持续稳定运行,减少了因过载导致的停机时间和维护成本。
值得注意的是,台达公司非常注重客户服务,通过在全国范围内设立71个分支机构和服务网点,如上海、武汉、济南、乌鲁木齐等城市的服务中心,确保了及时响应客户需求。他们的专业团队能够在2小时内做出反应,并在48小时内提供所需的维修或技术支持。此外,用户还可以通过400-820-9595热线或访问官方网站www.delta-china.com.cn获取更多资讯和帮助。
版权方面,此变频器C2000_PLUS系列是中达电通公司的产品,任何改动需得到官方许可。版本信息为4.0,发布日期为2021年2月,体现了公司对产品质量和更新迭代的持续投入。台达C2000_PLUS是一款功能强大、性能可靠且服务周到的工业变频器,是现代工业生产中不可或缺的关键设备。
7 8
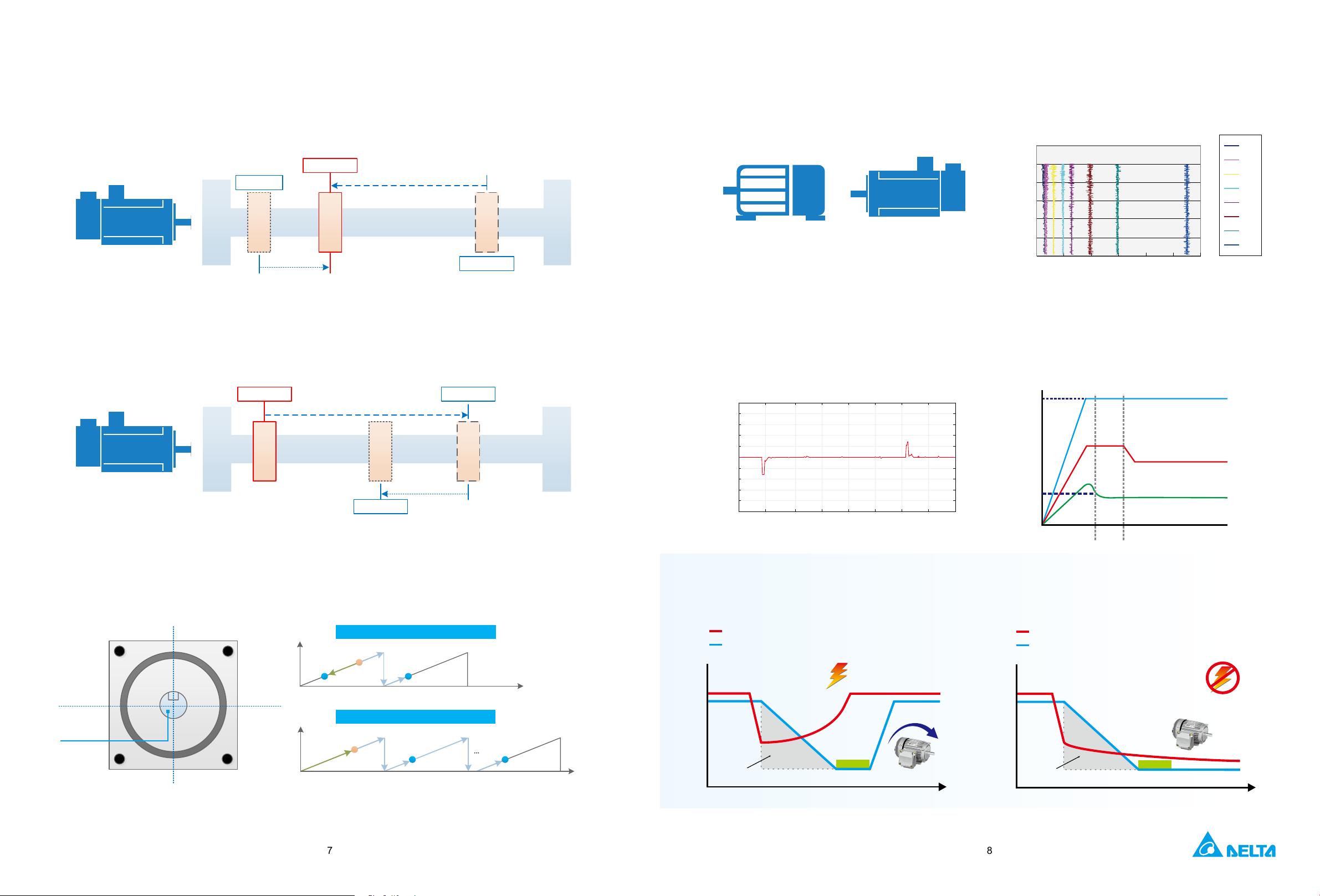
支持点对点位置控制 可驱动永磁电机
(
SPM、IPM
)
采感应电机与永磁电机控制双机模一体,利用永磁电机
动态响应特性,能精准控制位置、速度和转矩
高性能磁场矢量控制
控制模式 FOC + PG 在极低转速下,可以产生高达
150% 的初始转矩,提升速度控制极佳稳定度
0Hz
0.1Hz
0.5Hz
1Hz
2Hz
3Hz
5Hz
10Hz
C type
0
50
100
150
200
250
300
-1 1 3 5 7 9 11
Frequency(Hz)
Torque(%)
Example for 3.7kW model
冲击性负载的对应
当负载出现明显波动时,变频器将提供最佳的转矩
响应,藉由磁场控制方式,将电机速度波动降到最
低,并可抑制震动
自动节能功能
在定速运转时,会由负载功率自动计算最佳的电压
值供应给负载
100
150 200 250
300 350
400 450 500
-100
-80
-60
-40
-20
0
20
40
60
80
100
Time
Speed (RPM)
电流<(0.35X额定电流)
5秒
输出电压
输出电流
频率命令=频率输出
DEB 减速能源再生
瞬间断电时,可将电机减速至停车,避免机械损坏。亦可在电源回复时,追速启动
时间
电机
追速启动
DEB等待回复
DEB
减速停车
电机
安全停止
DEB等待回复
DEB
减速停车
电源非预期关闭
电源瞬断
市电电压
电机速度
市电电压
电机速度
时间
复归原点功能
多段位置功能
单点定位功能
当驱动器收到单点定位命令后,即可驱动电机停止于单圈内的特定位置
控制电机从一个位置定点运转到另一个指定位置的定位功能,可以同时使用 4 个多机能输入端子切换,
最多可以切换 15 个设定位置
复归原点是用来决定电机运动坐标系参考点,通过复归原点功能能够确保每次进行加工工艺的参考点都是相同
位置,主要应用于自动化设备内的线性移动平台或是旋转移动平台
自动化线性移动平台
伺服电机
当前位置 B
当前位置 A
移动平台原点
复归原点路径 A
复归原点路径 B
自动化线性移动平台
伺服电机
移动平台原点
位置命令A
移动路径B
移动路径A
位置命令
B
电机
电机转子
机械角度
0
O
机械角度
90
O
机械角度
180
O
机械角度
270
O
机械角度
电机运转圈数
机械角度
电机运转圈数
1
圈
2
圈
1
圈
2
圈
n
圈
0
O
0
O
360
O
360
O
电机当前
角度位置
单点定位位置 单点定位位置
RE V
FWD
电机当前
角度位置
移動中
单点定位位置 单点定位位置
电机保持静止时 ,设定单点定位的移动路径
电机移动时,设定单点定位的移动路径
PM motor
IM motor
剩余23页未读,继续阅读
2019-10-13 上传
2021-05-26 上传
2020-04-15 上传
2020-05-24 上传
2020-11-08 上传
2020-06-24 上传

制冷技术咨询与服务
- 粉丝: 4031
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 高清艺术文字图标资源,PNG和ICO格式免费下载
- mui框架HTML5应用界面组件使用示例教程
- Vue.js开发利器:chrome-vue-devtools插件解析
- 掌握ElectronBrowserJS:打造跨平台电子应用
- 前端导师教程:构建与部署社交证明页面
- Java多线程与线程安全在断点续传中的实现
- 免Root一键卸载安卓预装应用教程
- 易语言实现高级表格滚动条完美控制技巧
- 超声波测距尺的源码实现
- 数据可视化与交互:构建易用的数据界面
- 实现Discourse外聘回复自动标记的简易插件
- 链表的头插法与尾插法实现及长度计算
- Playwright与Typescript及Mocha集成:自动化UI测试实践指南
- 128x128像素线性工具图标下载集合
- 易语言安装包程序增强版:智能导入与重复库过滤
- 利用AJAX与Spotify API在Google地图中探索世界音乐排行榜
