ABB机器人通过PROFINET向西门子PLC实时传输坐标教程
版权申诉
本文档详细介绍了如何通过PROFINET通信技术实现ABB机器人与西门子PLC之间的实时坐标数据交换。首先,确保机器人(如IRB系列)和PLC(如S7-1200)的信号地址配置已经就绪,这通常涉及网络配置和设备参数设置,可以参考相关链接中的详细步骤。
在程序设计上,关键步骤包括:
1. 变量声明:在机器人侧,声明用于存储机器人TCP(工具中心点)坐标的数据变量,如num类型的单精度实数,用于x、y、z坐标值,以及dnum类型的双精度实数用于存储绕x、y、z轴的旋转角度。这些变量的声明对于后续的数据传输至关重要。
2. 组输出信号配置:因为坐标数据为32位单精度浮点数,所以在PLC的组输出信号中,需要设定相应的信号长度以适应数据类型。
3. 中断子程序:编写中断子程序,负责实时读取机器人当前位置,可能需要进行四元数到欧拉角的转换,以便于PLC理解和处理。
4. 实时位置数据发送:在子例行程序中,使用PackRawBytes指令将坐标数据打包成字节流,然后根据存储模式差异(小端或大端),可能需要调整数据顺序以适应PLC的大端存储方式。
5. 主程序编写:主程序中设置定时器中断,定期调用发送子程序,确保实时坐标数据的持续传输。
整个过程涉及硬件连接、通信协议理解(如PROFINET)、数据类型映射和处理,以及可能的实时性优化。理解并正确实施这些步骤,有助于确保ABB机器人与西门子PLC之间高效且准确的实时通信,这对于工业自动化生产线的控制和协调至关重要。在实际应用中,可能还需要考虑错误处理、数据验证和异常管理,以确保系统的稳定运行。
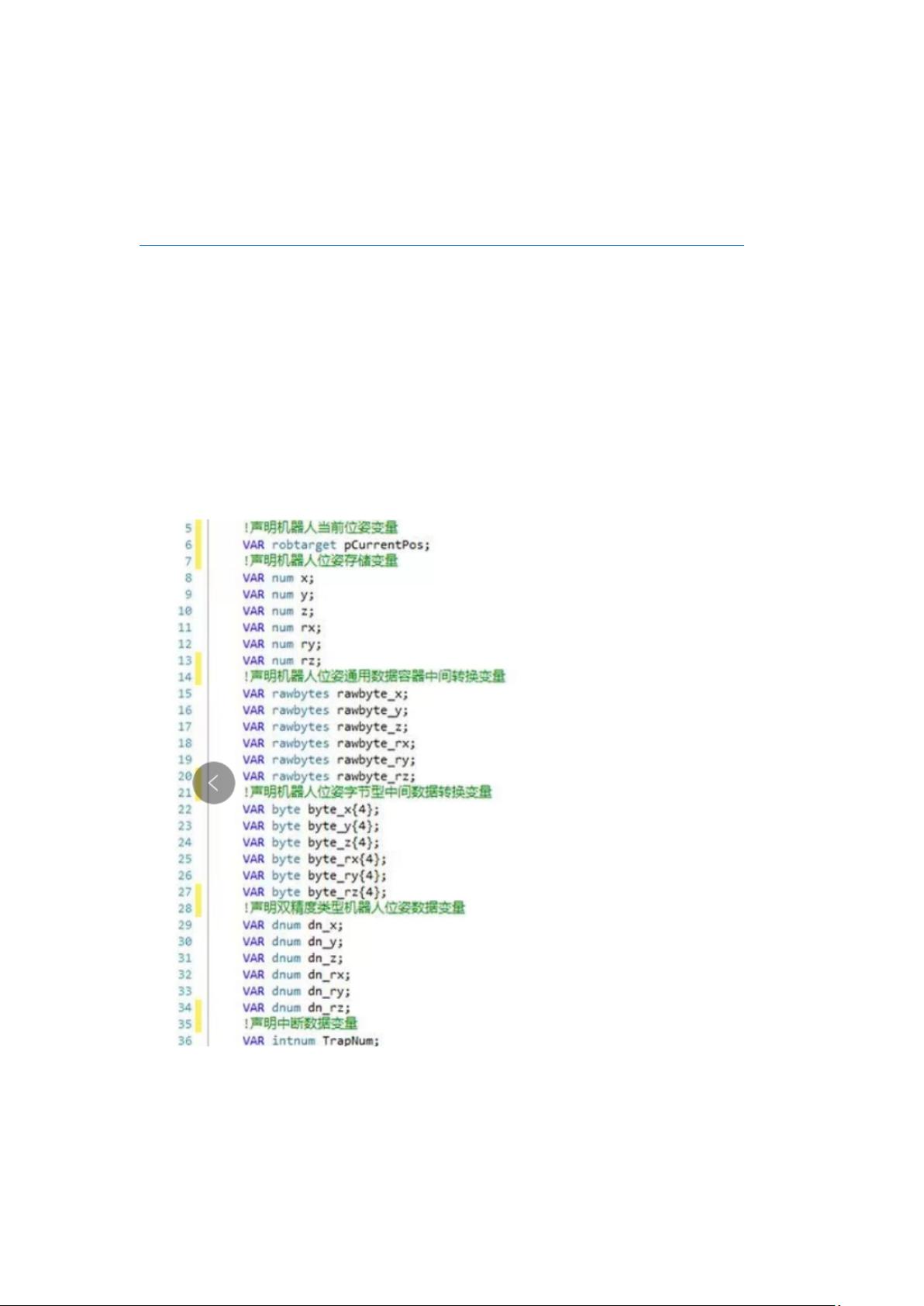
ABB 机器人将实时坐标发送给西门子 PLC 的具体方法示例
本次以 PROFINET 通信为例进行说明,演示 ABB 机器人将实时坐标发送给西门子 PLC 的具
体方法。
首先,要保证 ABB 机器人和 PLC 的信号地址分配已经完成,具体的内容可参考以下链接:
S7-1200PLC 与 ABB 机器人进行 PROFINET 通信的具体方法和步骤详解
交互的信号确认好之后,我们新建一个发送位置坐标的子程序,如下图所示,
声明所需要的变量
机器人的当前位置,即 TCP 的当前坐标,它是由 x、y、z 的坐标值以及分别绕 x、y、z
轴旋转的角度值组成,这些数据的类型均是实数类型。
在 ABB 机器人中,使用 num 与 dnum 来表示实数,其中 num 类型与西门子 PLC 中的 real
类型一致,都是 32 位的单精度实数;而 dnum 类型数据是 64 位的双精度实数。因此,
在机器人中,我们可以声明 num 类型变量来存放机器人的当前位置数据。同时,声明
其他类型的数据变量,作为数据处理的中间转换变量。
变量声明代码如下所示:
组输出信号配置
由于机器人当前位置数据都是 32 位的单精度实数类型,所以,我们
下载后可阅读完整内容,剩余3页未读,立即下载
1342 浏览量
2024-03-07 上传
2187 浏览量
847 浏览量
945 浏览量
608 浏览量
1355 浏览量

AAA_自动化工程师
- 粉丝: 7196
 我的内容管理
展开
我的内容管理
展开







最新资源
- 流浪汉环境性能比较:Virtualbox vs Parallels
- WatchMe项目使用TypeScript进行开发的介绍
- Nali:全面支持IPv4/IPv6离线查询IP地理及CDN信息工具
- 利用pdfjs-2.2.228-dist实现零插件PDF在线预览技术
- MATLAB与jEdit集成:实用工具包发布
- Vagrant、Ansible和Docker搭建Django应用环境
- 使用Delphi更改计算机名称的详细教程
- TrueNAS CORE中iocage-homeassistant插件的高级安装方法
- rack程序:命令行工具高效处理天气雷达数据
- VS2017下实现C# TCP一对多通信程序源码
- MATLAB项目管理器:快速切换与路径管理
- LightDM GTK+ Greeter设置编辑器的Python图形界面介绍
- 掌握CSS技巧,提升网页设计美感
- 一维RCWA算法在matlab中的实现与应用
- Hot Reload插件:提升Flutter开发效率的Vim工具
- 全面掌握Dubbo:Java面试题及详细答案解析
