SIFT算法详解:局部特征检测与应用
版权申诉
DOC格式 | 749KB |
更新于2024-07-04
| 4 浏览量 | 举报
"SIFT算法与研究"
SIFT(尺度不变特征转换)算法是计算机视觉领域中的一个关键技术,由David Lowe在1999年提出,并于2004年进行了详细阐述。该算法旨在检测图像中的局部特征,并对这些特征进行描述,使其在不同的尺度、旋转和光照变化下保持稳定。这种特性使得SIFT特征在多种应用场景中非常有用,如物体识别、机器人导航、图像拼接、3D建模、手势识别、图像追踪和动作匹配等。
1. 预备知识
1.1 SIFT特征的定义
SIFT特征主要由四个步骤构成:尺度空间极值检测、关键点定位、方向分配和特征描述。首先,通过高斯差分金字塔来构建尺度空间,以找到尺度不变的特征点。这些点是图像中在不同尺度下都存在的局部极值点。然后,对这些点进行精确的位置估计,以排除噪声和不稳定的点。接下来,确定每个关键点的方向,通常是通过分析关键点邻域内的梯度方向分布来实现。最后,生成特征描述符,这是一个向量,表示了关键点周围区域的灰度值变化,具有旋转不变性。
1.2 SIFT算法流程
(1) **尺度空间极值检测**:通过连续的高斯滤波器构建尺度空间,寻找局部极大值点,即SIFT关键点。
(2) **关键点定位**:精确定位这些极大值点,同时去除边缘响应和其他不稳定点。
(3) **方向分配**:为每个关键点分配一个主方向,通常基于关键点周围的梯度方向直方图。
(4) **特征描述**:在每个关键点周围的小窗口内,计算灰度值的变化,生成描述符向量。
2. SIFT特征的优势
SIFT特征具有尺度不变性、旋转不变性和部分亮度不变性,这使得它在实际应用中能够很好地应对图像的变形和光照变化。此外,SIFT描述符是高维的,增加了特征的唯一性,有利于特征匹配。
3. 应用场景
在物体识别中,SIFT可以用于找出两个不同视角或光照下的相同物体;在机器人地图感知与导航中,SIFT特征可以帮助机器人识别环境中的地标,实现自主导航;在图像拼接中,SIFT可以准确地找到图像间的对应点,实现无缝融合;在3D建模中,通过匹配SIFT特征,可以重建物体的三维结构;在手势识别和图像追踪中,SIFT提供了稳定的特征匹配,实现对目标的跟踪;在动作匹配中,SIFT可用于识别和比较不同视频中的相似动作序列。
尽管SIFT算法具有显著的优点,但它也有一定的局限性,比如计算复杂度较高,对于大规模图像数据处理可能效率较低,以及可能存在匹配误差。因此,在实际应用中,常常结合其他算法(如SURF、ORB等)以提高效率和鲁棒性。
SIFT算法是计算机视觉领域的一个里程碑,它的理论和实践价值至今仍被广泛认可和应用。随着深度学习等技术的发展,虽然出现了许多新的特征检测和描述方法,但SIFT作为经典算法,其原理和思想仍对现代图像处理技术有着深远的影响。
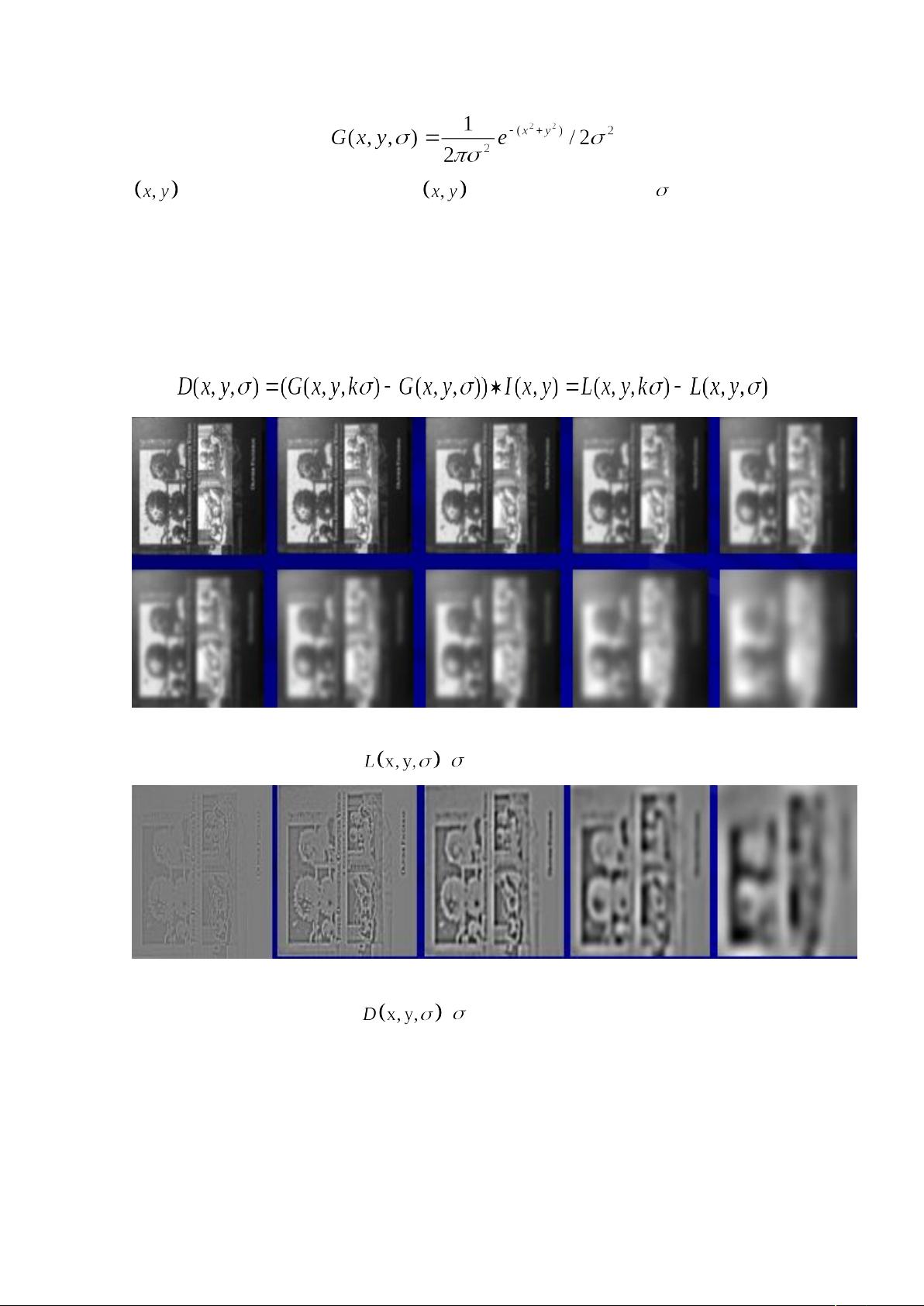
是空间坐标,符号*表示卷积, 代表图像的像素位置, 是尺度空间因子,
值越小表示图像被平滑的越少,相应的尺度也就越小。大尺度对应于图像的概貌特
征,小尺度对应于图像的细节特征。
为了有效的在尺度空间检测到稳定的关键点,提出了高斯差分尺度空间(DOG
scale-space)。利用不同尺度的高斯差分核与图像卷积生成。
图 2.1.1
, = 1.6 a good tradeoff
图 2.1.2
, = 1.6 a good tradeoff
4
剩余15页未读,继续阅读
相关推荐




老帽爬新坡
- 粉丝: 98
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- pawiis_pet_service
- misc.ka-开源
- rabbitmq 3.8.14版本可以用的延时插件
- EDSR(增强型深度超高分辨率)Matlab端口:EDSR(增强型深度超高分辨率)Matlab单图像超分辨率-matlab开发
- ICT-in-de-Wolken:ICT的信息库,位于沃尔肯(Wolken)
- valorant:圭亚那勇士
- FlutterCTipApp_03_实现滚动渐变的AppBar
- 媒体广告中的市场研究方法PPT
- MyFirstRep-Broadcast-Receiver-with-Vibrate-Alert-
- cursoAngular4:使用CodeSandbox创建
- SKIN_GCN:皮肤检测(使用GCN)
- grooming:美容网站 - Ignacio Prados
- constellation:适用于C ++的高性能线性代数库
- 元旦晚会策划案
- haxm-7.5.6.tar.gz
- nybble_core:使用Deployer创建的ARK.io区块链
