双轮自平衡小车:陀螺仪与卡尔曼融合的控制系统设计
版权申诉
随着科技的不断进步,两轮自平衡小车因其独特的优势——高效、便捷和娱乐性,在个人代步工具市场中日益受到关注。本文着重介绍了双轮自平衡小车的控制系统设计,这是一个关键的技术领域,它直接影响着车辆的稳定性和操作性能。
首先,该设计方案的核心是姿态检测装置,采用了先进的陀螺仪ENC-03和微机电系统(MEMS)加速度传感器MMA7260。陀螺仪是负责测量设备角速度变化的传感器,而MMA7260则提供了精确的加速度读数,两者结合能够实时监测小车在三维空间中的运动状态。为了提高数据的精度和稳定性,设计者运用了卡尔曼滤波算法,这是一种在噪声环境中进行估计和预测的有效方法,它能将陀螺仪的高速抖动数据与加速度计的低速趋势相结合,从而实现对小车平衡状态的准确估计。
作为控制系统的心脏,飞思卡尔16位单片机MC9S12XS128发挥了至关重要的作用。它的高计算能力和低功耗特性使得它能够处理来自传感器的大量数据,执行复杂的信号处理任务,如滤波算法,确保了控制指令的实时性和准确性。此外,它还支持人机交互功能,使得用户可以通过简单的操作界面来控制车辆的行驶方向和速度。
整个系统设计的关键在于模块间的协同工作。传感器数据的采集、预处理、融合,到最终的控制决策,每个环节都需要精细调校以确保系统的稳定运行。在无人干预的情况下,小车能够依靠内置的算法实现自主平衡,即使在存在外部干扰时也能迅速调整并恢复平稳状态。通过精确的控制,小车能够执行基础的动作,如前进、后退和左右转向,满足用户在日常生活中的多样需求。
总结起来,本文的双轮自平衡小车控制系统设计展示了现代信息技术如何融入到传统交通工具中,以提升用户体验和便利性。它不仅体现了创新技术的应用,也展示了如何在实际场景中实现复杂动态系统的有效控制。这项设计对于推动两轮自平衡小车技术的发展具有重要意义,并为其他类似交通工具的控制系统设计提供了有价值的参考。

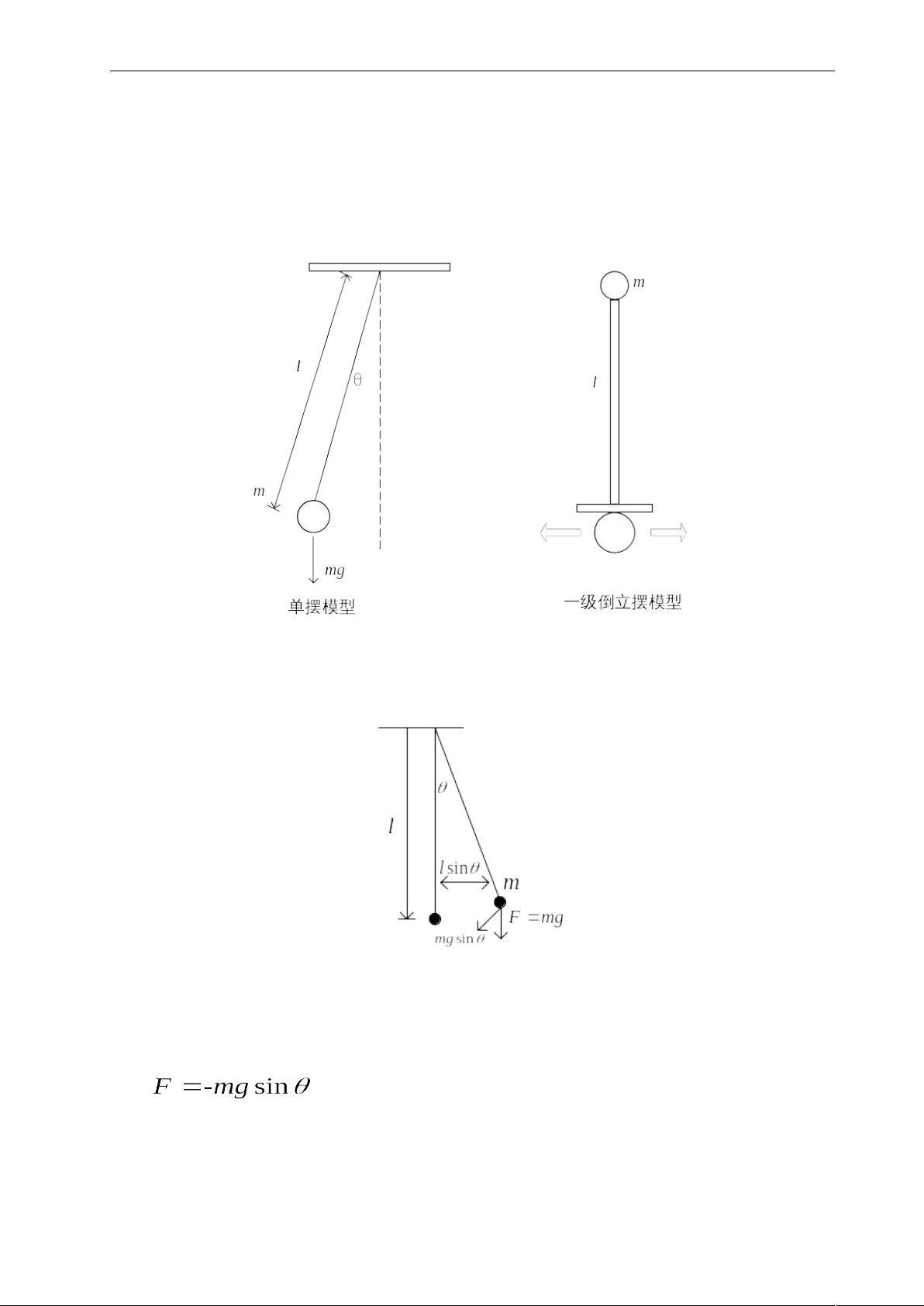
以让一根直木棍在手指尖保持直立不倒。这需要两个条件:一个是托着木棍的手指可以
自由移动;另一个是人的眼睛可以观察木棍的倾斜角度与倾斜趋势 (角速度)。这两个条件
缺一不可,实际上这就是控制系统中的负反馈机制,如图 2-1 所示。
图 2-1 保持木棍直立的反馈控制系统
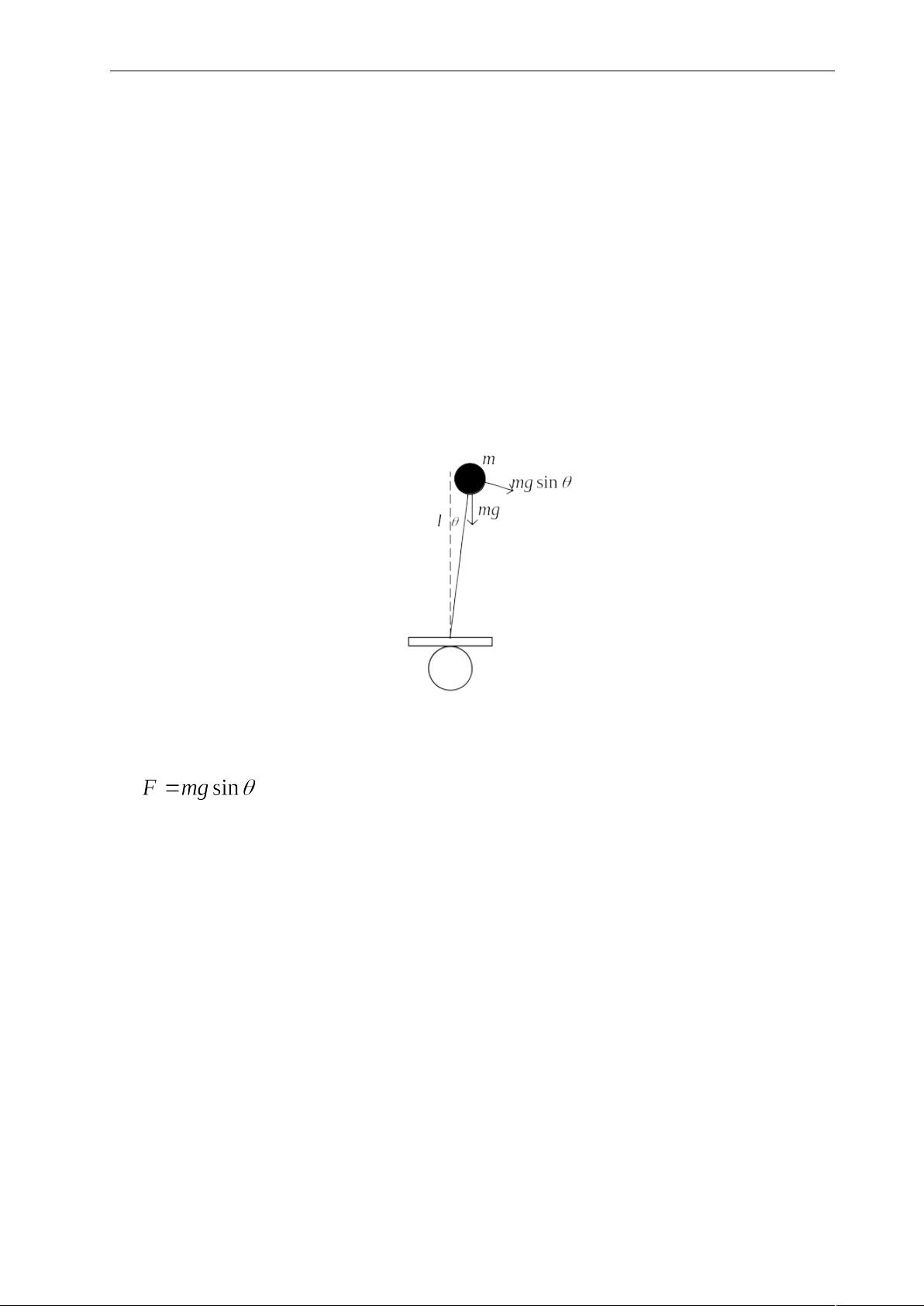
自平衡车的控制也是通过负反馈来实现的,与在指尖保持木棍直立比较则相对简单。
由于小车只依靠两个车轮着地,车轮与地面会发生相对滚动使得小车倾斜。而小车上装
载的姿态检测系统能够对小车的倾斜状况进行实时检测,通过控制器控制车轮转动,抵
消在这个维度上的倾斜力矩便可以保持小车平衡,如图 2-2 所示。
图 2-2 通过车轮转动保持小车平衡
2.3 自平衡小车数学模型
2.3.1 两轮自平衡小车受力分析
为了准确控制车轮转动,保持小车始终稳定的直立平衡,需要对自平衡车进行运动
学分析并建立其数学模型,从而更好的设计控制系统。
6
剩余56页未读,继续阅读
相关推荐





卷积神经网络
- 粉丝: 378
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握PerfView:高效配置.NET程序性能数据
- SQL2000与Delphi结合的超市管理系统设计
- 冲压模具设计的高效拉伸计算器软件介绍
- jQuery文字图片滚动插件:单行多行及按钮控制
- 最新C++参考手册:包含C++11标准新增内容
- 实现Android嵌套倒计时及活动启动教程
- TMS320F2837xD DSP技术手册详解
- 嵌入式系统实验入门:掌握VxWorks及通信程序设计
- Magento支付宝接口使用教程
- GOIT MARKUP HW-06 项目文件综述
- 全面掌握JBossESB组件与配置教程
- 古风水墨风艾灸养生响应式网站模板
- 讯飞SDK中的音频增益调整方法与实践
- 银联加密解密工具集 - Des算法与Bitmap查看器
- 全面解读OA系统源码中的权限管理与人员管理技术
- PHP HTTP扩展1.7.0版本发布,支持PHP5.3环境
