SIFT算法详解:关键点检测与应用解析
需积分: 46 65 浏览量
更新于2024-07-15
收藏 3.28MB DOCX 举报
SIFT特征检测算法是计算机视觉领域中的一个重要工具,特别是在图像处理任务中,其独特的优势使其脱颖而出。该算法由David Lowe于1999年提出,2004年得到了进一步完善,它的主要目标是在不同尺度空间中寻找稳定、不变的特征点,这些特征点包括角点、边缘点和亮度对比鲜明的区域,能够在光照、噪声和轻微的旋转或缩放变化下保持不变。
SIFT算法的核心流程包括以下步骤:
1. **图像高斯金字塔**:这是SIFT算法的基础,通过高斯滤波器对原始图像进行多次降采样和模糊,形成多层金字塔结构。每一层都是前一层的模糊版本,这样可以捕捉到不同尺度下的图像细节。
- 高斯金字塔构建:利用高斯函数进行模糊处理,公式中N的计算遵循3σ原则,确保卷积窗口大小适当。
- 高斯函数与图像卷积:通过 NxN 的模板对每个像素进行卷积,模板大小根据高斯函数的标准差动态调整。
- 分离高斯卷积:为提高效率和保留边缘信息,可以采用分离卷积的方式,先沿X轴后沿Y轴进行卷积。
2. **关键点检测**:在高斯金字塔的每一层中寻找可能的关键点,这些点通常位于局部极值处,如边缘、角点或亮度对比明显的区域。关键点检测不仅考虑位置,还包含了尺度和方向信息,保证了特征点的不变性。
3. **关键点描述子**:对于每个检测到的关键点,SIFT算法会计算一个描述子,这个描述子包含了周围像素的梯度方向和强度信息,用于区分不同的关键点。描述子具有良好的局部不变性和信息量大,使得在大规模数据库中能快速匹配。
4. **匹配和定位**:当需要在不同图像中识别相同的对象时,SIFT描述子可以用来匹配特征点,即使存在光照、旋转和尺度变化,也能找到匹配的点并确定物体的位置和方向。
SIFT算法的应用广泛,包括物体识别、机器人导航、图像拼接、三维建模、手势识别、视频跟踪和动作比对等。它的稳健性和准确性使得它在计算机视觉任务中扮演着关键角色。然而,由于计算成本较高,尤其是在早期没有现代硬件支持的情况下,所以尽管有这些优点,SIFT在实时应用中可能会受到限制。尽管如此,SIFT仍然是计算机视觉领域的一个基石,后续的研究和改进,如加速版的SURF和ORB,都在SIFT的基础上寻求性能与效率的平衡。
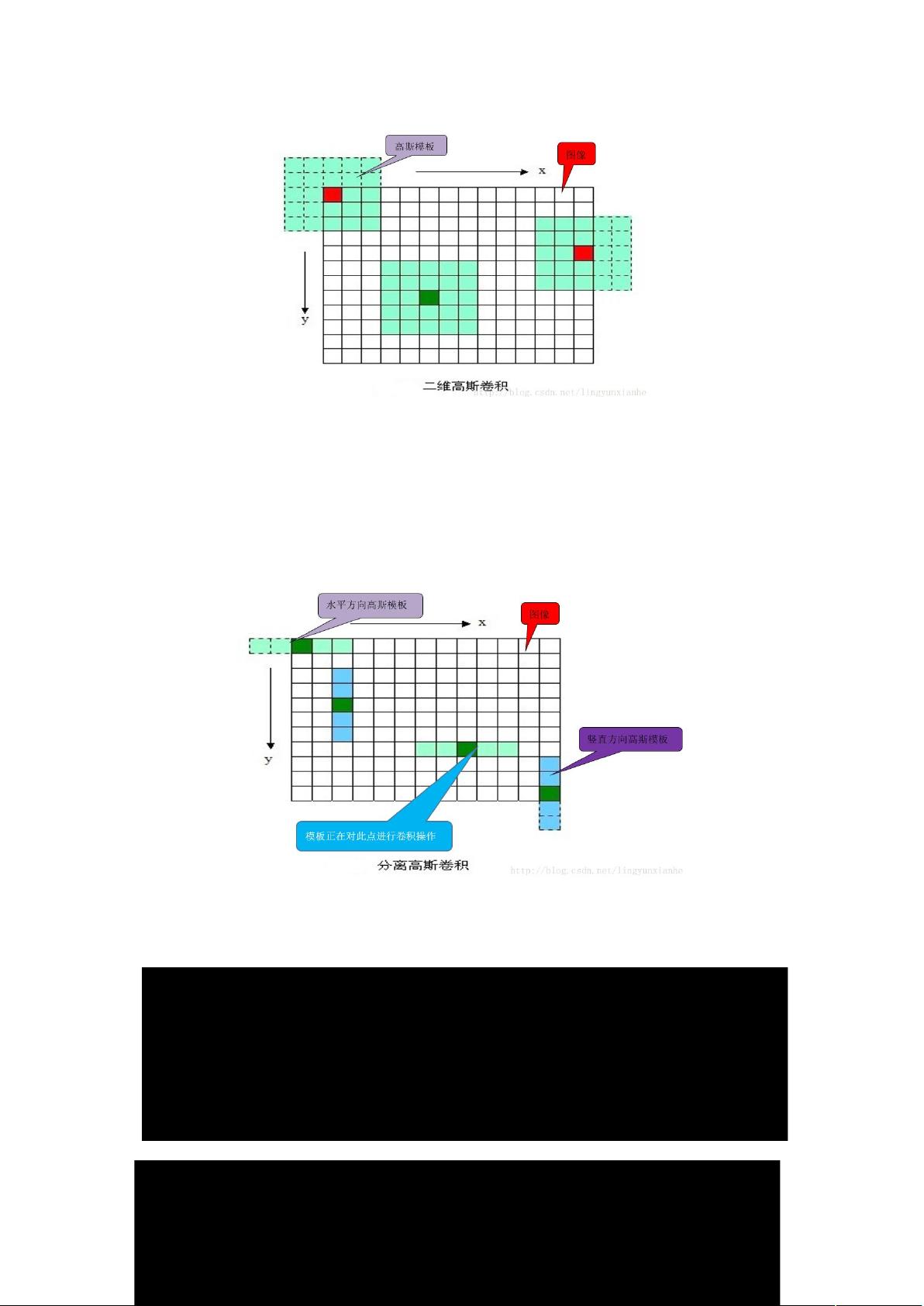
2.1.3、分离高斯卷积
上面这样直接与图像卷积,速度比较慢,同时图像边缘信息也会损失严重。后来,后
来、、、,不知哪位学者发现,可以使用分离的高斯卷积(即先用 1xN 的模板沿着 X 方向
对 图 像 卷 积 一 次 , 然 后 用 Nx1 的 模 板 沿 着 Y 方 向 对 图 像 再 卷 积 一 次 , 其 中
N=[(6σ+1)]且向上取最邻近奇数),这样既省时也减小了直接卷积对图像边缘信息的
严重损失。
2.1.4、高斯金子塔源码分析
for (int o = 0; o < octvs; o++)//金字塔组数为 octvs,
{
for (int i = 0; i < intvls + 3; i++)//每一组有 intvls + 3 层,intvls 一般为 3
{
if (o == 0 && i == 0)//如果是第一组第 1 层
{
//base 为原始灰度图像经过升采样或降采样得到的图像
gauss_pyr[o][i] = cvCloneImage(base);
剩余18页未读,继续阅读
2017-09-06 上传
2022-06-17 上传
2022-06-24 上传
2022-06-24 上传
2022-06-06 上传
2022-06-09 上传
2022-06-03 上传


听风者868
- 粉丝: 592
- 资源: 12
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java集合ArrayList实现字符串管理及效果展示
- 实现2D3D相机拾取射线的关键技术
- LiveLy-公寓管理门户:创新体验与技术实现
- 易语言打造的快捷禁止程序运行小工具
- Microgateway核心:实现配置和插件的主端口转发
- 掌握Java基本操作:增删查改入门代码详解
- Apache Tomcat 7.0.109 Windows版下载指南
- Qt实现文件系统浏览器界面设计与功能开发
- ReactJS新手实验:搭建与运行教程
- 探索生成艺术:几个月创意Processing实验
- Django框架下Cisco IOx平台实战开发案例源码解析
- 在Linux环境下配置Java版VTK开发环境
- 29街网上城市公司网站系统v1.0:企业建站全面解决方案
- WordPress CMB2插件的Suggest字段类型使用教程
- TCP协议实现的Java桌面聊天客户端应用
- ANR-WatchDog: 检测Android应用无响应并报告异常
