优化集群文件系统单点故障恢复策略:性能提升研究
PDF格式 | 1.18MB |
更新于2024-08-30
| 183 浏览量 | 举报
本文《集群文件系统中的单故障恢复再思考》是一篇发表于2016年6月的会议论文,关注于在高度可用的集群文件系统设计中提升单故障恢复性能的重要性。随着分布式计算环境的普及,系统容错性和数据完整性成为关键需求。研究者Zhirong Shen、Jiwu Shu 和 Patrick P. C. Lee 从清华大学计算机科学技术系和香港中文大学计算机科学与工程系的角度,共同探讨了如何通过创新方法和技术来优化这一核心问题。
在传统的集群文件系统中,单故障恢复往往涉及冗余数据复制和错误检测机制,旨在减少服务中断时间和数据丢失风险。然而,随着硬件的进步和工作负载的复杂性增加,单纯依赖于冗余可能不再是最佳策略。论文提出了一种新的视角,重新评估现有恢复策略的效率和资源消耗,旨在寻找更为智能和高效的故障处理机制。
作者们可能分析了当前系统的瓶颈,比如恢复过程中的网络延迟、I/O开销、存储空间利用率等,并提出了潜在的改进策略,如基于预测算法的故障预防、轻量级的数据保护机制或者利用机器学习进行故障模式识别。他们还可能研究了不同类型的故障(如硬盘故障、网络故障或软件错误)对恢复性能的影响,以及如何平衡恢复速度和资源开销。
论文的核心内容可能包括对现有解决方案的评估,对比实验结果,以及提出新的理论模型或设计原型。为了进一步讨论和获取详细的技术细节,读者可以访问ResearchGate上的相关链接,通过Zhirong Shen、Jiwu Shu 或 Patrick P. C. Lee 的个人资料查看他们的14篇和91篇已发表文章,以及超过1,085次的引用情况。
该研究不仅对现有的集群文件系统架构进行了深入剖析,还对未来的设计趋势和优化方向提供了有价值的见解。对于IT专业人士和系统管理员来说,这篇文章提供了一个宝贵的参考,帮助他们在应对现代数据中心挑战时,更好地理解和优化单故障恢复策略,从而提高整体系统的可靠性和性能。
(i.e., the amount of data to be retrieved across racks for data
reconstruction), which plays an important role in improving
the single failure recovery performance with regard to the
scarce cross-rack bandwidth in a CFS. Second, our single
failure recovery design should address general fault tolerance
(e.g., based on RS codes). Finally, we should balance the
amount of cross-rack repair traffic at the rack level (i.e., across
multiple racks) while keeping the total amount of cross-rack
repair traffic minimum, so as to ensure that the single failure
recovery performance is not bottlenecked by a single rack.
To this end, we propose cross-rack-aware recovery (CAR),
a new single failure recovery algorithm that aims to reduce
and balance the amount of cross-rack repair traffic for a
single failure recovery in a CFS that deploys RS codes for
general fault tolerance. CAR has three key techniques. First,
for each stripe, CAR examines the data layout and finds a
recovery solution in which the resulting repair traffic comes
from the minimum number of racks. Second, CAR performs
intra-rack aggregation for the retrieved chunks in each rack
before transmitting them across racks in order to minimize
the amount of cross-rack repair traffic. Third, CAR examines
the per-stripe recovery solutions across multiple stripes, and
constructs a multi-stripe recovery solution that balances the
amount of cross-rack repair traffic across multiple racks.
Our contributions are summarized as follows.
• We reconsider the single failure recovery problem in the
CFS setting, and identify the open issues that are not
addressed by existing studies on single failure recovery.
• We propose CAR, a new cross-rack-aware single failure
recovery algorithm for a CFS setting. CAR is designed
based on RS codes. It reduces the amount of cross-rack
repair traffic for each stripe, and additionally searches for
a multi-stripe recovery solution that balances the amount
of cross-rack repair traffic across racks.
• We implement CAR and conduct extensive testbed ex-
periments based on different CFS settings with up to 20
nodes. We show that CAR can reduce 66.9% of cross-
rack repair traffic and 53.8% of recovery time when
compared to a baseline single failure recovery design that
does not consider the bandwidth diversity property of a
CFS. Also, we show that CAR effectively balances the
amount cross-rack repair traffic across racks.
The rest of this paper proceeds as follows. Section II
presents the background details of erasure coding and reviews
related work on single failure recovery. Section III formulates
and motivates the problem in the CFS setting. Section IV
presents the design of CAR. Section V presents our evalu-
ation results on CAR based on testbed experiments. Finally,
Section VI concludes the paper.
II. BACKGROUND AND RELATED WORK
In this section, we provide the background details on erasure
coding in the context of a CFS. We also present the open issues
to be addressed in this paper.
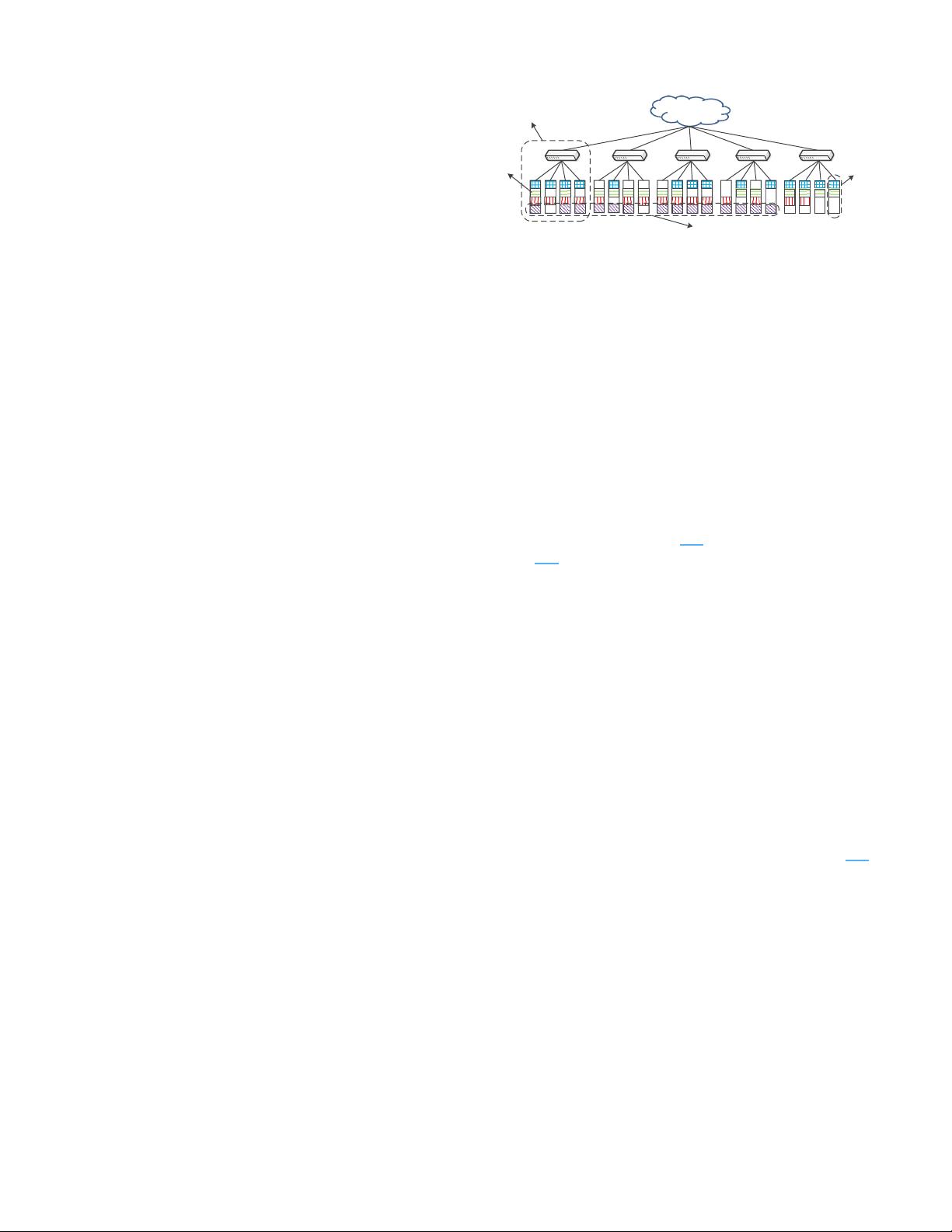
Stripe
Rack
Chunk
Node
Network Core
Fig. 1. Illustration of a CFS architecture that is composed of five racks with
four nodes each. The CFS contains four stripes of 14 chunks encoded by a
(k = 8, m = 6) code, in which the chunks with the same color and fill
pattern belong to the same stripe. Note that the number of chunks in each
node may be different.
A. Basics
This paper considers a special type of distributed storage
system architecture called a clustered file system (CFS), which
arranges storage nodes into racks, such that all nodes within
the same rack are connected by a top-of-rack switch, while
all racks are connected by a network core. Figure 1 illustrates
a CFS composed of five racks with four nodes each (i.e., 20
nodes in total). Some well-known distributed storage systems,
such as Google File System [12], Hadoop Distributed File
System [32], and Windows Azure Storage [4], realize the CFS
architecture.
We use erasure coding to maintain data availability for a
CFS. We consider a popular family of erasure codes that
are: (1) Maximum Distance Separable (MDS) codes, meaning
that fault tolerance is achievable with the minimum storage
redundancy (i.e., the optimal storage efficiency), and (2)
systematic, meaning that the original data is retained after
encoding. Specifically, we construct a (k, m) code (which is
MDS and systematic) with two configurable parameters k and
m. A (k, m) code takes k original (uncoded) data chunks of
the same size as inputs and produces m (coded) parity chunks
that are also of the same size, such that any k out of the
k + m chunks can sufficiently reconstruct all original data
chunks. The k + m chunks collectively form a stripe, and are
distributed over k+m different nodes. Note that the placement
of chunks should also ensure rack-level fault tolerance [18],
such that there are at least k chunks for data reconstruction
in other surviving racks in the presence of rack failures. We
address this issue when we design CAR (see Section IV).
For an erasure-coded CFS that stores a large amount of
data, it contains multiple independent stripes of data/parity
chunks. In this case, each node stores a different number of
chunks that belong to multiple stripes. For example, referring
to the CFS in Figure 1, there are four stripes spanning over 20
nodes, in which the leftmost node stores four chunks, while
the rightmost node stores only two chunks.
B. Erasure Code Constructions
There have been various proposals on erasure code con-
struction in the literature. Practical erasure codes often realize
剩余12页未读,继续阅读
相关推荐


1 浏览量

2 浏览量
2 浏览量

weixin_38677244
- 粉丝: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- Verilog实现的Xilinx序列检测器设计教程
- 九度智能SEO优化软件新版发布,提升搜索引擎排名
- EssentialPIM Pro v11.0 便携修改版:全面个人信息管理与同步
- C#源代码的恶作剧外表答题器程序教程
- Weblogic集群配置与优化及常见问题解决方案
- Harvard Dataverse数据的Python Flask API教程
- DNS域名批量解析工具v1.31:功能提升与日志更新
- JavaScript前台表单验证技巧与实例解析
- FLAC二次开发实用论文资料汇总
- JavaScript项目开发实践:Front-Projeto-Final-PS-2019.2解析
- 76云保姆:迅雷云点播免费自动升级体验
- Android SQLite数据库增删改查操作详解
- HTML/CSS/JS基础模板:经典篮球学习项目
- 粒子群算法优化GARVER-6直流配网规划
- Windows版jemalloc内存分配器发布
- 实用强大QQ机器人,你值得拥有
