数据驱动PID自整定算法改进与实现
需积分: 0 21 浏览量
更新于2024-08-05
收藏 600KB PDF 举报
本文主要探讨了基于数据驱动的PID自整定算法的研究。传统PID(比例-积分-微分)控制算法通常依赖于给定的试验信号进行参数调整,这种方法未能充分利用历史数据来优化控制器性能。为了克服这一局限性,作者在介绍了经典PID控制理论的基础上,引入了数据驱动的方法。
作者首先对经典的PID整定技术进行了深入的介绍和分析,强调了其在实际应用中的局限性,尤其是在处理动态变化和噪声干扰时的不足。数据驱动的PID自整定算法的核心思想是利用过去的数据集,通过系统辨识来估计模型参数,以此提高控制器的适应性和准确性。这涉及到系统模型的建立,特别是如何通过历史数据进行有效的特征提取和模型识别。
在研究中,作者将灵敏度作为性能指标,因为灵敏度反映了控制器对系统输入变化的响应能力,是衡量PID控制器性能的重要参数。通过使用OPC(开放平台通讯)接口,可以实现实时数据采集,使得PID自整定算法能够根据实时运行数据进行自我调整,从而实现基于数据驱动的优化。
该研究不仅包括理论分析,还包含了实际软件开发的部分。作者构建了一套基于数据驱动的PID自整定软件,该软件能通过用户输入或自动采集的数据,动态调整PID控制器的参数,使之适应不断变化的系统环境。这种自适应控制策略可以显著提升系统的稳定性和效率,尤其是在工业自动化和过程控制领域有广泛应用潜力。
本文为PID控制技术提供了一个新的视角,即通过数据驱动的方式实现PID参数的自动调整,这在当前大数据和人工智能快速发展的背景下具有重要的理论价值和实践意义。同时,这也为工程师们提供了一种更加智能化和高效的控制系统设计方法。
Microcom
p
uter
A
pp
lications
Vol.33
,
No.10
,
2017
研究与设计 微型电脑应用
2017
年第
33
卷第
10
期
作者简介
:
高菲
(
1981
-
),
女
,
陕西人
,
硕士研究生
,
研究方向
:
计算机教育
。
文章编号
:
1007
-
757X
(
2017
)
10
-
0058
-
05
基于数据驱动的
PID
自整定算法研究
高菲
(
宝鸡职业技术学院
,
721000
)
摘
要
:
传统的
PID
整定技术以给定试验信号为基础
,
不能很好的利用这些历史数据
,
通过在介绍和分析经典
PID
整定技术
的基础之上
,
利用历史数据完成数据驱动辨识方法研究
,
以灵敏度为性能指标研究
PID
自整定算法
,
并通过
OPC
接口采集数
据完成基于数据驱动的
PID
自整定软件实现
。
关键词
:
数据驱动
;
PID
自整定
;
系统辨识
;
灵敏度
;
OPC
;
自整定软件
中图分类号
:
TG409
文献标志码
:
A
Research
on
Data
-
driven
PID
Self
-
tunin
g
Al
g
orithm
Gao
Fei
(
Bao
j
i
p
rofessional
technolo
gy
institute
,
721000
)
Abstract
:
The
traditional
PID
settin
g
technolo
gy
is
based
on
g
iven
test
si
g
nals
,
and
can
not
make
g
ood
use
of
these
historical
data.In
this
p
a
p
er
,
based
on
the
introduction
and
anal
y
sis
of
the
classical
PID
settin
g
technolo
gy
,
the
historical
data
are
used
to
com
p
lete
a
data
-
driven
identification
method
research.The
PID
self
-
tunin
g
al
g
orithm
is
studied
with
the
sensitivit
y
as
the
p
er
-
formance
index.And
data
is
collected
throu
g
h
the
OPC
interface
to
com
p
lete
the
data
-
driven
PID
self
-
tunin
g
software
im
p
le
-
mentation.
Ke
y
words
:
Data
-
driven
;
PID
self
-
tunin
g
;
S
y
stem
identification
;
Sensitivit
y
;
OPC
;
Self
-
tunin
g
software
0
引言
随时工业生产工艺越来越复杂
,
工业生产环境越来越恶
劣等因素的影响
,
对
PID
控制器的控制要求提出了更多更复
杂的要求
,
希望
PID
控制器的控制方式更加准确与全自动化
操作
[
1
]
。
在实际的工业应用中
,
只有少部分的
PID
控制器能
够比较满意的运行
,
其主要原因是
PID
参数的整定工作没有
做好
,
以传统的
PID
自整定技术需外加试验信号来获取过程
模型
,
如阶跃响应和 频 率 响 应 等
,
这种做法一般只适应于在
系统运行之初和系统停机调试的情况
,
当系统正在运行时这
种方法往往不能表现了出色
[
2
]
。
在线运行的系统
,
操作员频繁操作和长时间运行下会积
累大量的历史数据
,
如何通过这些数据进行
PID
自整定研究
而不是通过实验的方法来获得过程模型
,
通过灵敏度作为性
能指标既能提高系统的鲁棒性能又能以比较好的方式进行
PID
参数自整定
[
3
]
。
本文主要研究了基于数据驱动的
PID
自
整定算法及软件实现
,
利用历史数据完成数据驱动辨识方法
研究
,
以灵敏度为性能指标研究
PID
自 整 定 算 法
,
并 通 过
OPC
接口采集数据完成基于数据驱动的
PID
自 整 定 软 件
实现
。
1
基于灵敏度的
PID
自整定方法
在工业过程控制的发展中
,
PID
自整定技术实现了人们
从手动调节到计算机计算调节的解脱
[
4
]
。
大多数工业过程
处于高温
、
高压等恶 劣 的 环 境 中
,
而处于现场的一些控制器
常常需要操作员去现场亲自动手操作
,
这样的操作往往是粗
放的
,
现场的
PID
控制异常复杂
[
5
]
。
面对向火电厂发电机组
这样复杂的控制对象
,
ZN
整定法相对来说效果不那么明显
,
基于灵敏度的
PID
自整定算法能够更好的表现出复杂控制
对象的 更 多 特 性
,
可以更好的完成火电机组的回路优化
工作
[
6
]
。
设
G
1
(
s
)
=
G
c
(
s
)
G
p
(
s
),
则灵敏度的定义为式
(
1
)。
M
s
=
Max
0
≤
ω
≤
∞
1
1
+
G
c
(
j
ω
)
G
p
(
j
ω
)
(
1
)
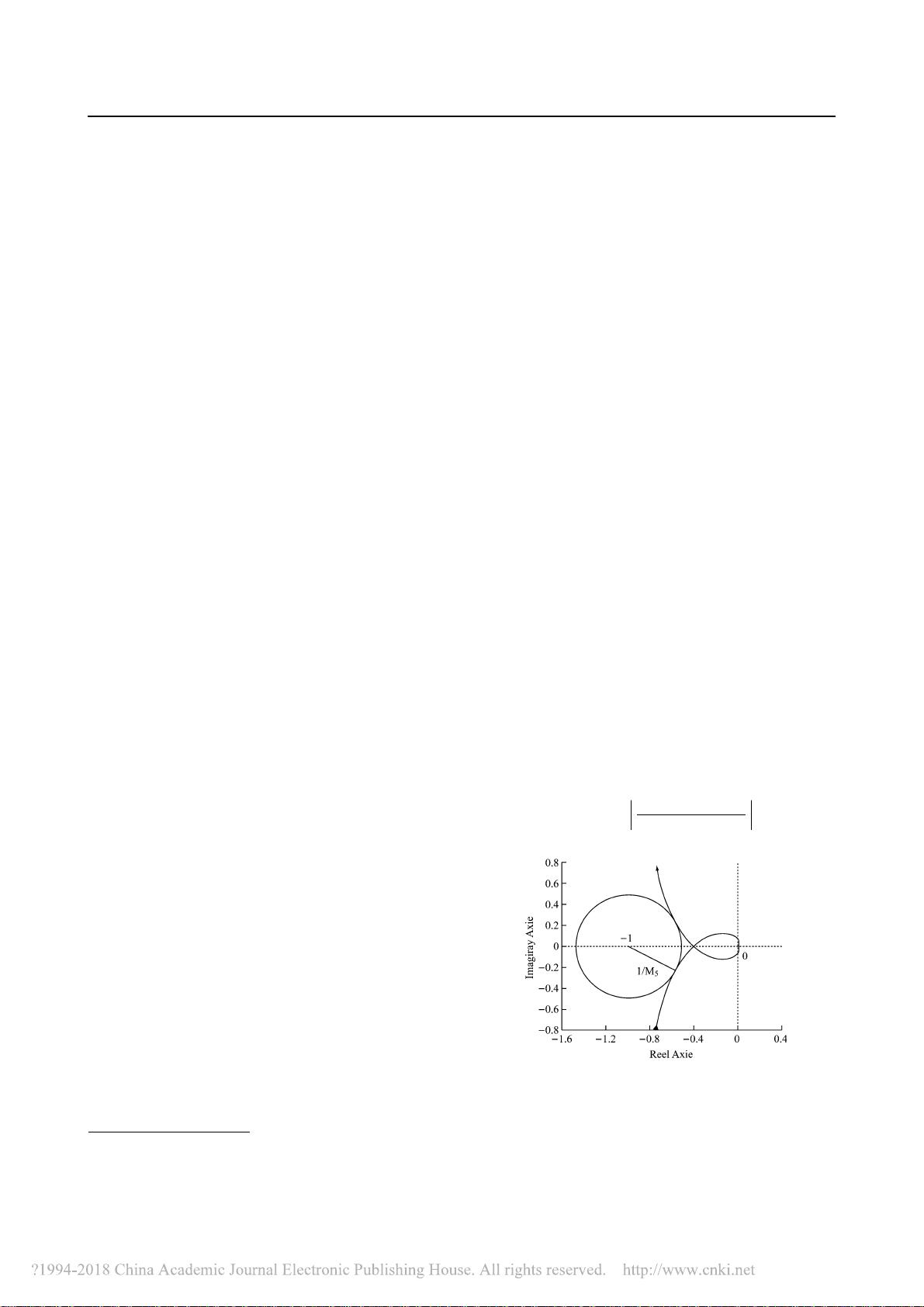
如图
1
所示
。
图
1
灵敏度控制器设计方法的几何表示
灵敏度的约束条件是
G
1
(
j
ω
)
的
N
yq
uist
曲线不能进入
·
85
·
下载后可阅读完整内容,剩余4页未读,立即下载
2015-11-12 上传
2021-07-11 上传
点击了解资源详情
2024-10-23 上传

张匡龙
- 粉丝: 25
- 资源: 279
 我的内容管理
展开
我的内容管理
展开







最新资源
- 单片机串口通信仿真与代码实现详解
- LVGL GUI-Guider工具:设计并仿真LVGL界面
- Unity3D魔幻风格游戏UI界面与按钮图标素材详解
- MFC VC++实现串口温度数据显示源代码分析
- JEE培训项目:jee-todolist深度解析
- 74LS138译码器在单片机应用中的实现方法
- Android平台的动物象棋游戏应用开发
- C++系统测试项目:毕业设计与课程实践指南
- WZYAVPlayer:一个适用于iOS的视频播放控件
- ASP实现校园学生信息在线管理系统设计与实践
- 使用node-webkit和AngularJS打造跨平台桌面应用
- C#实现递归绘制圆形的探索
- C++语言项目开发:烟花效果动画实现
- 高效子网掩码计算器:网络工具中的必备应用
- 用Django构建个人博客网站的学习之旅
- SpringBoot微服务搭建与Spring Cloud实践
