C语言实现的PID算法教程:原理与示例
需积分: 47 89 浏览量
更新于2024-07-24
收藏 377KB DOC 举报
PID算法是一种广泛应用在工业自动化领域的控制策略,由比例(P)、积分(I)和微分(D)三个部分组成,旨在通过线性组合优化控制系统的响应和稳定性。本文档详细介绍了如何在C语言中实现增量式PID算法,针对51单片机平台设计。
首先,PID控制器的基本原理是根据输入偏差(e(t))计算控制量(u(t)),公式如下:
\[ u(t) = K_p \cdot e(t) + K_i \cdot \int_{0}^{t} e(\tau)d\tau + K_d \cdot \frac{de(t)}{dt} \]
其中,\( K_p \)、\( K_i \)和\( K_d \)分别代表比例、积分和微分增益。
1. **比例控制** (P): 只考虑当前的偏差,快速纠正误差,但无法消除稳态误差。如果增益过大,可能导致系统不稳定。
2. **积分控制** (I): 通过累加误差的时间积分来减小稳态误差,但单独使用积分可能会导致调节动作过慢,系统响应延迟。
3. **微分控制** (D): 基于误差的变化率,能够预测未来误差趋势,加快系统响应,尤其在滞后系统中有显著效果,但对噪声敏感。
在实际应用中,如单回路控制系统中,PID控制器根据控制需求灵活选择组合形式,如比例控制(P),比例积分(PI),或比例积分微分(PID)。比例+积分(PI)控制器可以确保系统在稳态下没有稳态误差,而比例+积分+微分(PID)则提供了更全面的动态性能和快速响应能力。
该C语言程序提供了一种实现PID算法的基础框架,适用于51单片机这样的嵌入式设备,适合用于温度、压力、流量等工艺参数的自动控制。理解并掌握PID算法的关键在于正确调整各增益参数,同时处理好控制系统的动态响应与稳定性的平衡。
此外,文档还提到了控制器的阶跃响应图,展示了不同控制策略下的系统响应特性,这对于理解和调试PID控制器的性能至关重要。理解这些原理和图形可以帮助工程师更好地设计和优化PID算法以适应具体的应用场景,提高系统的控制精度和效率。
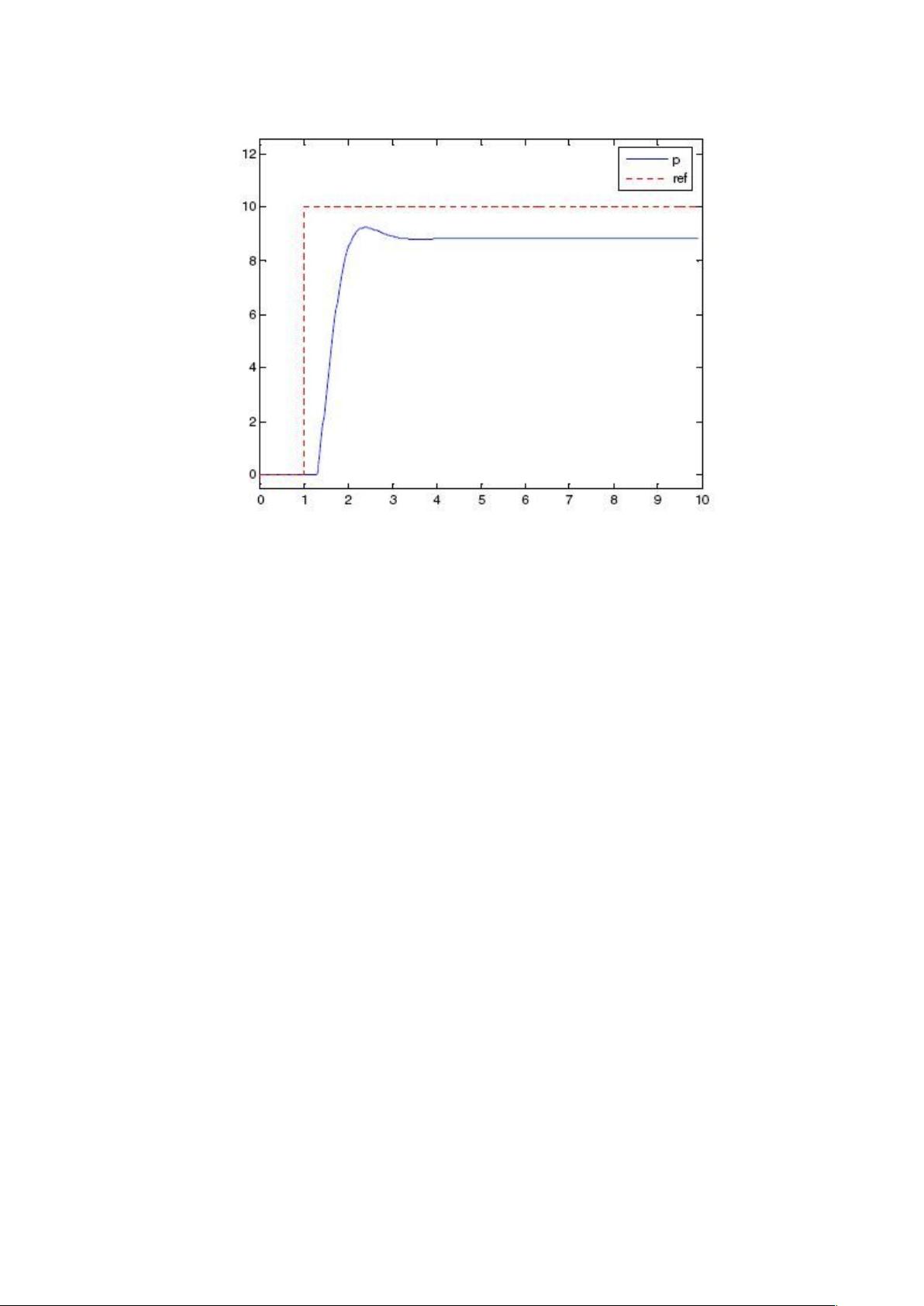
图 2 比例(P)控制阶跃响应
积分(I)控制
在积分控制中,控制器的输出与输入误差信号的积分成正比关系。
为了减小稳态误差,在控制器中加入积分项,积分项对误差取决于时间的
积分,随着时间的增加,积分项会增大。这样,即使误差很小,积分项也会随
着时间的增加而加大,它推动控制器的输出增大使稳态误差进一步减少,直到
等于零。
积分(I)和比例(P)通常一起使用,称为比例+积分(PI)控制器,可以使系统在
进入稳态后无稳态误差。如果单独用积分(I)的话,由于积分输出随时间积累而
逐渐增大,故调节动作缓慢,这样会造成调节不及时,使系统稳定裕度下降。
剩余14页未读,继续阅读
276 浏览量
529 浏览量
190 浏览量
401 浏览量
188 浏览量
812 浏览量
147 浏览量

Axinzw
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 3561VI.zip
- minisdp:无服务器 WebRTC 的较小 sdp
- 易语言源码易语言信息框DIY工具源码.rar
- nadatrace_shiny
- omnibear:Micropub浏览器扩展
- docker-workflow-tutorial
- DOM-manip_wk6_day5_wkend_hw
- 因子模型和套利定价理论(APT)
- material-ui-tree:具有material-ui v4的React树组件
- java-ssm框架图书管理系统(附sql)
- fruit-catcher1
- Python-Code-Generation:使用语言模型编写python代码
- 销售代理评估表DOC格式
- 初级java笔试题-ISTE-120:使用面向对象方法解决信息领域问题的第一门课程。学生将学习使用面向对象的方法设计软件解决方案,使用UML对
- 易语言源码易语言保存超级列表框到excel格式源码.rar
- covid-risk:根据德国RKI(Robert-Koch-Institut)的交互式世界地图,显示高风险COVID-19区域
