光照不变表示的机器人vSLAM鲁棒闭环检测方法
需积分: 5 133 浏览量
更新于2024-08-12
收藏 184KB PDF 举报
"本文提出了一种基于学习的光照不变表示的鲁棒闭环检测方法,用于机器人视觉SLAM系统,旨在解决光照变化对图像匹配准确性的影响,以及不同季节图像关键点匹配的问题。通过使用学习到的特征构成的图像描述符,该方法能够适应光照和季节的变化,实现在长期室内或室外环境中的有效闭环检测。实验结果表明,该方法在真实数据集上的表现优秀,特别是在处理光照变化方面。"
在机器人视觉SLAM(Simultaneous Localization and Mapping)系统中,鲁棒的闭环检测是确保地图一致性、提高定位精度的关键环节。闭环检测是指当机器人回到之前已经访问过的位置时,能够识别出这一循环并进行相应的地图更新。然而,光照条件的变化是影响视觉SLAM性能的一个主要挑战,因为光照变化可能导致图像特征难以匹配,从而影响闭环检测的准确性和效率。
本文提出的解决方案在于引入一种学习型光照不变表示。这种表示法是一种由学习到的特征组成的图像描述符,它能够抵抗光照变化的影响,确保在不同的光照条件下,相同的地标在图像中的描述仍然相似。通过训练模型来学习这些光照不变的特征,可以提高关键点匹配的准确性,即使是在季节更替导致的大幅度环境变化下。
此外,该方法还考虑了季节性变化,这在长期的户外SLAM应用中尤为重要。季节性变化可能导致场景的视觉外观发生显著变化,传统的基于特征的图像匹配方法可能失效。学习型光照不变表示可以适应这些变化,增强机器人在不同时间点识别相同地点的能力,即视觉地方识别(Visual Place Recognition)。
为了验证方法的有效性,作者在多个真实世界的数据集上进行了实验。实验结果证明,所提方法在处理光照变化时表现出色,提高了闭环检测的鲁棒性,这对于实现长期、可靠的机器人SLAM系统至关重要。这种方法对于移动机器人在复杂和多变环境中的自主导航具有重要的实际应用价值。
Robust Loop-Closure Detection with a Learned
Illumination Invariant Representation
for Robot vSLAM*
Shilang Chen
1
, Junjun Wu
1,†
, Yanran Wang
2
, Lin Zhou
1
, Qinghua Lu
1
, Yunzhi Zhang
1
1
School of Mechatronics Engineering, Foshan University, Foshan 528000, China
2
Department of Computer Science, Jinan University, Guangzhou 510632, China
Abstract— Robust loop-closure detection plays a key role
for the long-term robot visual Simultaneous Localization and
Mapping(SLAM) in indoor or outdoor environment, due to
illumination changes can greatly affect the accuracy of online
image matching, and keypoints may fail to match between
images taken at thesame location but different seasons. In this
paper, we propose a robust loop-closure detection method for
robot visual SLAM, which adopts invariant representation as
image descriptors composed of learned features and adapts to
changes in illumination and seasons. We evaluate our method
on real datasets and demonstrate its excellent ability to handle
illumination changes.
Index Terms— Visual SLAM, Loop Closure Detection, Vi-
sual Place Recognition, Illumination Invariant Feature, Moblie
Robot, Convolutional Neural Network
I. INTRODUCTION
Since the development of bionics and intelligent robot
technology, researchers have been longing for one day, robots
can observe and understand the world around them through
their eyes, and be able to walk flexibly in a natural environ-
ment, so as to achieve man-machine integration. After nearly
30 years of theoretical research and technology precipitation,
people have made many exciting achievements on this issue
and gradually applied it to the emerging technology industry,
such as sweeper robot, self-driving, unmanned aerial vehicle,
virtual reality and augmented reality. The rise of these widely
followed industries has been underpinned by a basic technol-
ogy: Simultaneous Localization and Mapping, especially for
visual SLAM.
In the process of visual SLAM, if the current image is
similar to a certain image encountered before, the loop-
closure detection algorithm should give a recognition signal,
and then let the back-end algorithm for verification and
subsequent processing. If the return loop-closure can be
detected correctly, the robot will have the ability to relocate
after the loss, and can effectively reduce the cumulative error
caused by the visual odometry to obtain a globally consistent
map.
*This work is supported by National Natural Science Founda-
tion of China(61603103); Natural Science Foundation of Guangdong,
China(2016A030310293, 2018A030310352); Science and Technology Pro-
gram of Guangzhou, China(201707010013); Foshan University Graduate
Freedom Exploration Fund Project.
†
Corresponding author e-mail: jjunwu@fosu.edu.cn.
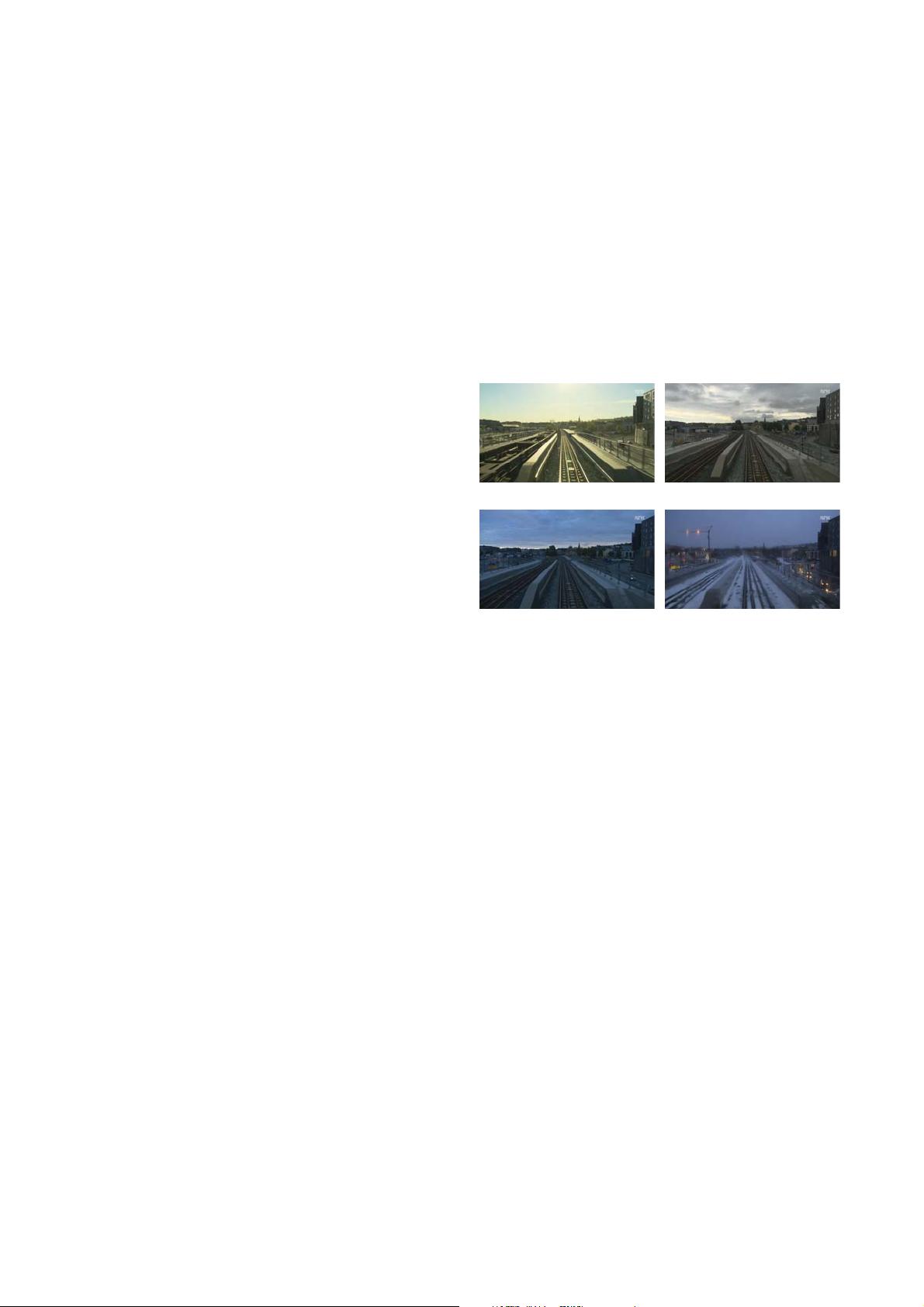
(a) spring (b) summer
(c) fall (d) winter
Fig. 1. Four images observed from the same place in spring, summer, fall,
and winter
In the visual SLAM, mapping relies on visual features
or keyframes to describe the environment, while robot lo-
calization will be completed by matching the image of
features or keyframes on the map [1]. However, mobile
robots are in a complex and changeable environment, which
includes illumination, time, weather, seasons(e.g. Fig. 1)
and the dynamic changes of various objects. Loop-closure
detection is the most important component of visual SLAM,
and loop-closure detection is most susceptible to the above
conditions. Improve the invariance of the mobile robot under
various conditions, especially under illumination changes, is
a necessary condition for mobile robots to work robustly.
In the paper, we propose a novel learning method for loop-
closure detection of visual SLAM. The method does not use
a visual vocabulary(such as bag-of-words) and uses a selec-
tive subset of visual Convolutional Neural Networks(CNN)
features straight for image description. It also has good
illumination invariance and viewpoint invariance. The main
processes include creating CNN database, detecting image
features with Learned Invariant Feature Transform(LIFT)
[2], generating image descriptor, and detecting loop-closure
candidates. In particular, the contributions of this paper are:
(1) A novel illumination invariance image descriptor de-
scribes the keyframe of the environment.
(2) An effective loop-closure detection method without
2019 IEEE 4th International Conference on Advance
d
Robotics and Mechatronics (ICARM)
978-1-7281-0064-7/19/$31.00 ©2019 IEEE
342
下载后可阅读完整内容,剩余5页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-06-30 上传
2021-03-20 上传
2019-08-16 上传
2021-08-18 上传
2024-05-15 上传

weixin_38701407
- 粉丝: 5
- 资源: 917
 我的内容管理
展开
我的内容管理
展开







最新资源
- java版商城源码-4sg:小而简单的SVGSankey生成器(使用XSLT)
- FPGA实现推箱子游戏.7z
- Single-Price-Grid-Component
- RaspberryPi 安装 WindowsArm 驱动 20200315drv_rpi4.zip
- PiperBlocklyLibrary:CircuitPython库支持使用RP Pico微控制器的块编码
- 易语言图片任意旋转源码.zip易语言项目例子源码下载
- Grades_Calc
- cschool:基本的Rails应用程序中的基本代码学校-谁想要雄心勃勃的人都可以免费打开手提袋
- 码
- data-structure
- 行业文档-设计装置-一种笔尾设置可折叠掏耳勺的方便笔.zip
- 华为简历-求职简历-word-文件-简历模版免费分享-应届生-高颜值简历模版-个人简历模版-简约大气-大学生在校生-求职-实习
- usov.tech
- 蒂莫·格拉斯特拉
- Webcam Fun +-开源
- semaphore_nuxt
