工业机器人腕部结构设计详解:关节型整体方案与关键技术
版权申诉
92 浏览量
更新于2024-07-03
收藏 1.57MB PDF 举报
本文档深入探讨了工业机器人的结构设计,特别是针对关节型工业机器人腕部的详细分析。工业机器人作为自动化生产中的关键设备,其核心组成部分包括操作机、驱动单元、控制装置以及人工智能系统。
1. **工业机器人概述**
工业机器人定义广泛,国际上普遍认为它是一种可编程、多功能的自动化操作机,用于在工业生产环境中执行搬运、装配、焊接等工作。例如,美国工业机器人工业协会将其定义为具备重复编程能力的装置,能够完成多种任务。我国的国家标准也定义了工业机器人为自动定位控制、可编程的装置,强调了其在材料处理和工具操作中的应用。
2. **操作机结构**
操作机是工业机器人的主体,它模仿人类手臂的功能。包括:
- **末端执行器(手部)**:直接接触工作对象,可能配备夹持器、工具或传感器。
- **手腕**:负责调整末端执行器的位置和姿态,通常至少有2-3个回转自由度。
- **手臂**:由动力关节和连接件构成,支撑手腕和末端执行器,有时包含肘关节和肩关节。
- **机座(立柱)**:基础部件,固定或移动,提供稳定性并承受力。
3. **驱动单元**:为机器人的各个部分提供动力,由驱动器和检测单元组成。
4. **控制装置**:用户操作的界面,用于启动、停止机器人以及进行示教,确保其按照预定指令运行。
5. **人工智能系统**:分为感觉系统和决策规划部分,前者负责收集环境信息,后者处理这些信息并制定行动策略。
**题目来源与目标**
该毕业设计课题源于关节型工业机器人的实际需求,重点关注腕部结构的设计,包括整体方案构思、细节设计以及相关零件的工程设计。通过这样的研究,学生将深入理解工业机器人技术,并提升机械设计和控制系统集成的能力。
总结来说,本文档深入探讨了工业机器人尤其是关节型工业机器人的机械结构,特别是重点讨论了腕部这一关键组件的结构设计过程,这对于理解工业机器人的工作原理、机械工程和自动化技术的应用具有重要意义。

开闭角应保证工件能顺利进入或脱开,若夹持不同直径的工件,应按最大直径
的工件考虑。对于移动型手指只有开闭幅度的要求。
(三)保证工件准确定位
为使手指和被夹持工件保持准确的相对位置,必须根据被抓取工件的形状,
选择相应的手指形状。例如圆柱形工件采用带“ V”形面的手指,以便自动定
心。
(四)具有足够的强度和刚度
手指除受到被夹持工件的反作用力外,还受到机械手在运动过程中所产生
的惯性力和振动的影响,要求有足够的强度和刚度以防折断或弯曲变形,当应
尽量使结构简单紧凑,自重轻,并使手部的中心在手腕的回转轴线上,以使手
腕的扭转力矩最小为佳。
(五)考虑被抓取对象的要求
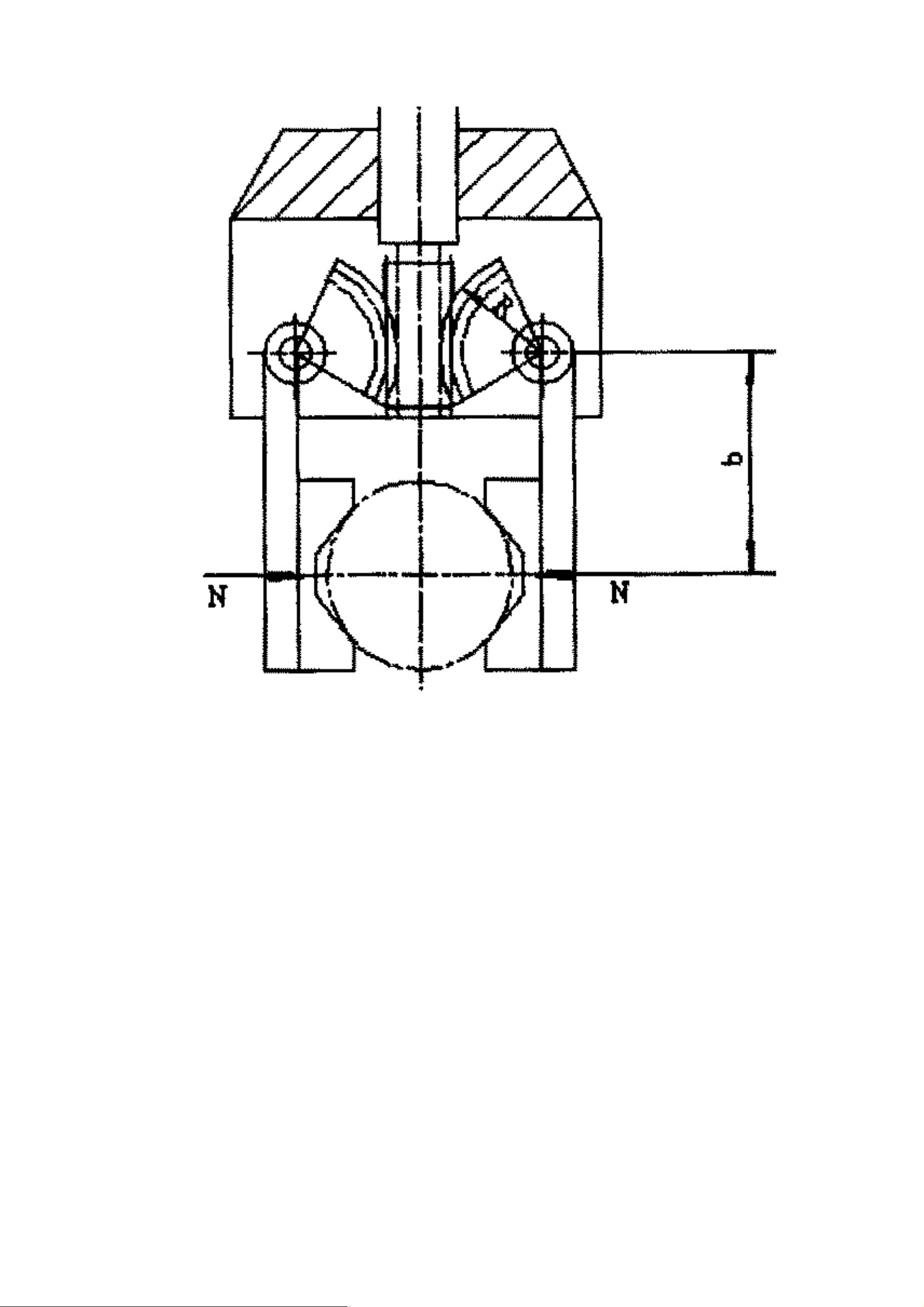
根据机械手的工作需要,通过比较,我们采用的机械手的手部结构是一支
点, 两指回转型,由于工件多为圆柱形,故手指形状设计成V型,其结构如附
图所示。
3.1.3手部夹紧气缸的设计
1、手部驱动力计算
本课题气动机械手的手部结构如图3-1所示:
剩余35页未读,继续阅读
2022-07-12 上传
2021-11-28 上传
2022-11-04 上传
2021-12-17 上传
2022-11-13 上传
2021-08-14 上传

xxpr_ybgg
- 粉丝: 6726
- 资源: 3万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握压缩文件管理:2工作.zip文件使用指南
- 易语言动态版置入代码技术解析
- C语言编程实现电脑系统测试工具开发
- Wireshark 64位:全面网络协议分析器,支持Unix和Windows
- QtSingleApplication: 确保单一实例运行的高效库
- 深入了解Go语言的解析器组合器PARC
- Apycula包安装与使用指南
- AkerAutoSetup安装包使用指南
- Arduino Due实现VR耳机的设计与编程
- DependencySwizzler: Xamarin iOS 库实现故事板 UIViewControllers 依赖注入
- Apycula包发布说明与下载指南
- 创建可拖动交互式图表界面的ampersand-touch-charts
- CMake项目入门:创建简单的C++项目
- AksharaJaana-*.*.*.*安装包说明与下载
- Arduino天气时钟项目:源代码及DHT22库文件解析
- MediaPlayer_server:控制媒体播放器的高级服务器
