3D视觉建模:从图像到三维重建
需积分: 9 196 浏览量
更新于2024-09-11
收藏 332KB PPT 举报
"3D视觉建模通过图像实现,主要涉及单视几何、多视几何以及三维重建等关键概念。该技术旨在通过自由移动相机自动提取逼真的3D模型,其流程包括特征点提取、匹配、问题处理及其它方法。在整体流程中,特征点的检测和匹配是核心步骤,而投影几何中的针孔相机模型是理解3D重建的基础。"
3D视觉建模是一种利用图像序列创建与原物相似比例的三维模型的技术。其目标是通过自由地移动相机,从不同角度捕获对象,从而构建出一个具有真实感的3D模型。这一过程主要基于单视几何和多视几何的原理,其中单视几何研究单一视角下的3D信息,而多视几何则利用多个视角来恢复立体信息。
特征点在3D建模中扮演着关键角色。它们应具备足够的局部特性,即使在微小位移后,也能够与周围环境区分开,例如角点。特征点匹配是通过7x7像素窗口进行的,通常采用的方法有SSD(最小方差和)和NCC(归一化互相关)。匹配过程中会遇到缩放、旋转和光照条件变化的问题,以及异常值(outliers),这些问题可以通过采用仿射不变区域的匹配方法和RANSAC算法(随机抽样一致性算法)来解决,以提高匹配的稳健性。
除了特征点,线或曲线也可以作为建模的依据。SIFT(尺度不变特征变换)是一种广泛应用的特征描述符,它具有尺度不变性和旋转不变性,能有效应对图像的变化。
投影几何,特别是针孔相机模型,是理解3D视觉建模的关键。在这个模型中,三维世界坐标(X, Y, Z)通过相机的焦距(f)和像素坐标(x, y)被映射到二维图像平面上。相机的投影矩阵(P)将三维空间中的点转换为二维图像坐标,P是一个4x4的矩阵,包含了相机内参和外参。
3D视觉建模涉及到图像处理、几何学和机器学习等多个领域的知识,通过特征点提取、匹配、问题解决策略以及投影几何的运用,最终实现从二维图像到三维模型的转换。这一技术广泛应用于虚拟现实、机器人导航、计算机辅助设计等多个领域。
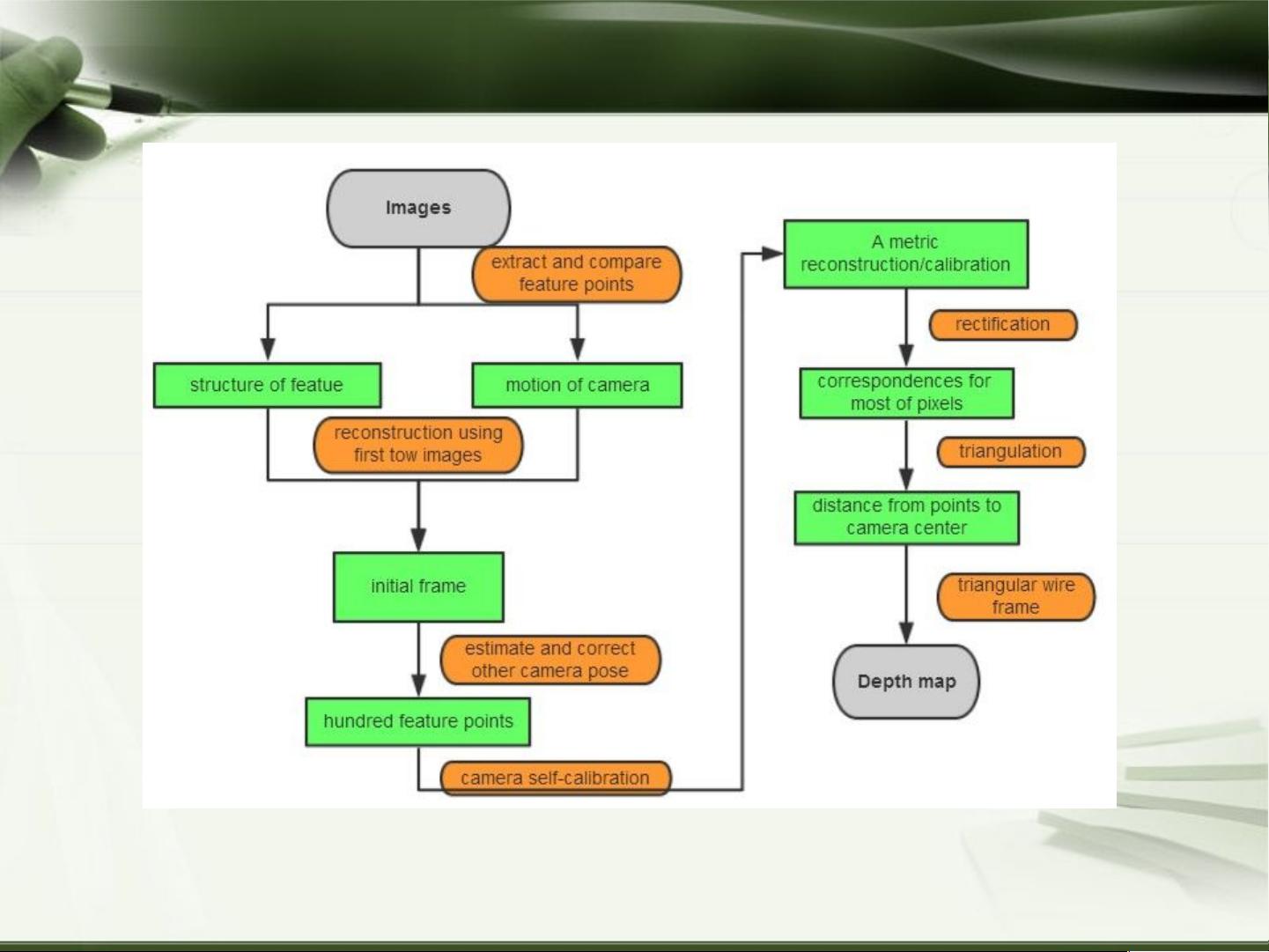
Overall Flow Chart
剩余11页未读,继续阅读
2021-11-20 上传
2009-07-31 上传
2008-12-19 上传
2021-01-14 上传
2021-12-24 上传
2022-06-04 上传
2023-02-08 上传
2023-01-04 上传
2021-09-29 上传

佐佑手之魂
- 粉丝: 14
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- 火炬连体网络在MNIST的2D嵌入实现示例
- Angular插件增强Application Insights JavaScript SDK功能
- 实时三维重建:InfiniTAM的ros驱动应用
- Spring与Mybatis整合的配置与实践
- Vozy前端技术测试深入体验与模板参考
- React应用实现语音转文字功能介绍
- PHPMailer-6.6.4: PHP邮件收发类库的详细介绍
- Felineboard:为猫主人设计的交互式仪表板
- PGRFileManager:功能强大的开源Ajax文件管理器
- Pytest-Html定制测试报告与源代码封装教程
- Angular开发与部署指南:从创建到测试
- BASIC-BINARY-IPC系统:进程间通信的非阻塞接口
- LTK3D: Common Lisp中的基础3D图形实现
- Timer-Counter-Lister:官方源代码及更新发布
- Galaxia REST API:面向地球问题的解决方案
- Node.js模块:随机动物实例教程与源码解析
