电动四驱汽车差动助力转向的独立转矩控制研究
版权申诉
41 浏览量
更新于2024-07-05
收藏 5.62MB PDF 举报
"电动四驱汽车在差动助力转向时的独立车轮转矩控制"
在电动四驱汽车中,独立车轮转矩控制是一项重要的技术,尤其在差动助力转向系统中,它能显著提升车辆的操控性能和驾驶体验。差动助力转向是一种创新的转向技术,它通过独立控制每个车轮的驱动力矩来实现更精确的转向和更高的动态稳定性。
文章首先介绍了差动助力转向系统的基本理论,这一系统依赖于轮毂电机的特性,使得每个车轮都能独立接收和调节驱动力。四驱电动汽车的动力学模型和驱动模型在此基础上建立,这些模型对于理解车辆的行为和设计有效的控制策略至关重要。
接着,文章详细阐述了驱动扭矩分配和补偿控制系统的设计。该系统利用比例积分反馈控制回路,通过调节两个前轴车轮之间的驱动转矩,以跟踪设定的转向参考。这有助于减少驾驶员的转向力度,特别是在高速行驶时,保证车辆的稳定性和转向精度。
文章还提到了直接横摆力矩控制子系统和牵引力控制系统。这两个子系统协同工作,前者用于改善车辆的横向稳定性,后者则确保在各种路况下车辆的牵引力控制,进一步增强了差动助力转向的工作效能。
仿真验证部分展示了开环和闭环控制系统的效果,证明了提出的差动驱动扭矩助力转向系统可以有效减小转向阻力,提高车辆的回正性能,并且在保持横向稳定性的同时,允许车辆在高车速下安全、准确地转向。
全轮独立驱动系统为电动和混合动力汽车带来了许多优势,包括结构紧凑、响应快速和转向灵活性。通过差动助力转向,车辆可以实现更加精细的操控,甚至可能不再需要传统的动力转向系统,从而节省能量并简化系统设计。
先前的研究,如防滑转向和牵引/制动系统,为差动助力转向提供了理论基础,但这些方法主要针对特殊场景或车辆类型。而本文提出的方案则是对传统转向机构的改进,利用差动驱动扭矩为车辆提供辅助转向力,特别是在大曲率路径行驶时,能够实现更佳的转向性能。
电动四驱汽车的差动助力转向和独立车轮转矩控制是未来汽车技术发展的一个重要方向,它有望大幅提升车辆的驾驶性能、稳定性和能效,为电动汽车的驾驶体验带来革命性的变化。
可以分别计算输出变量,比如牵引力,侧向力和自我调整的时刻。
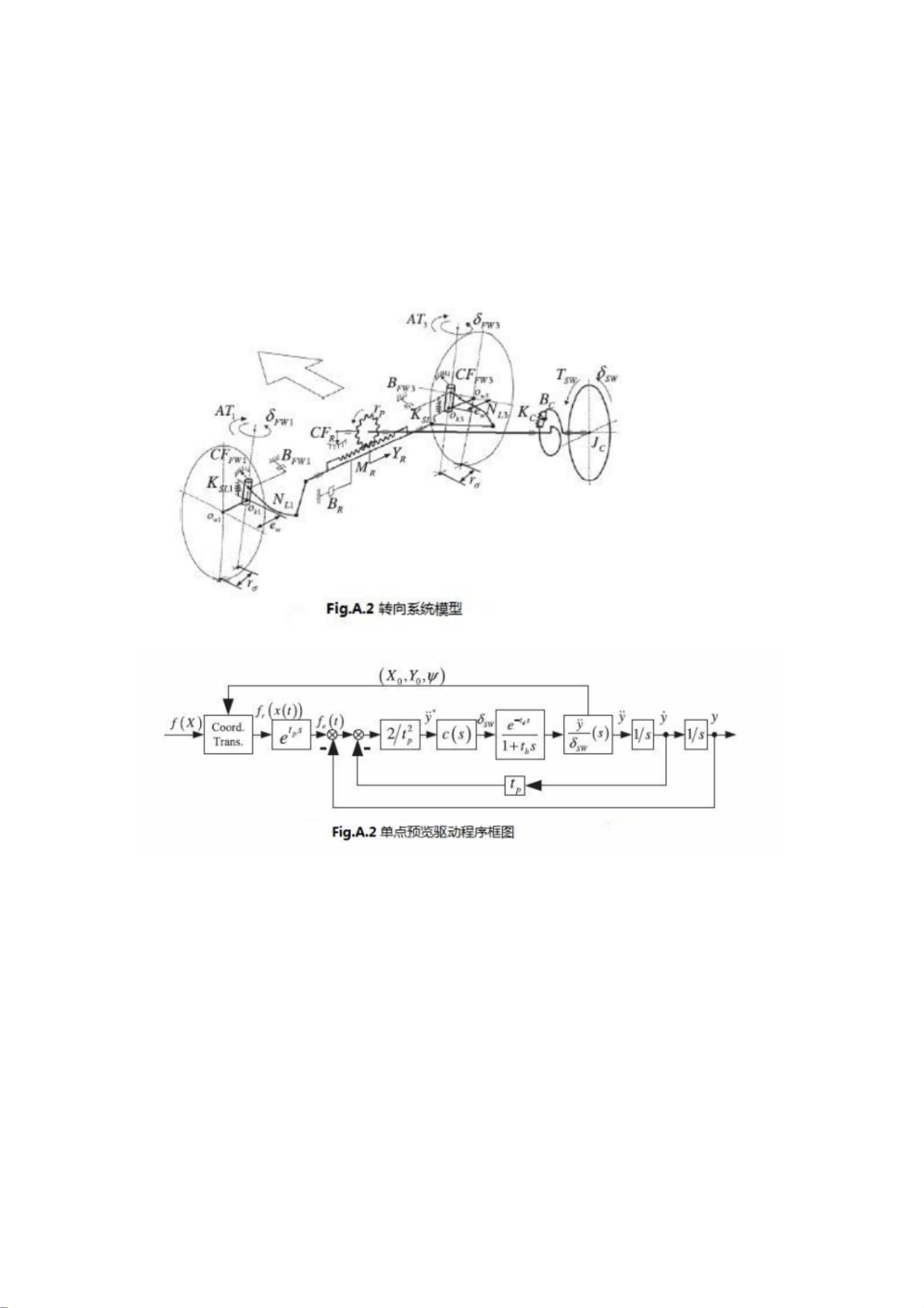
之后,转向变速箱的齿轮齿条转向系统子模型可以简化为 4 自由度的模型,如
附录 A.2 图所示。 其中 AT1 和 AT2 分别是调整左, 右车轮转向的时刻, CFFWis
和 CFR 分别是主销周围的干摩擦力矩与杆件机构周围的干摩擦力。此外,在本
文中,一种预览跟踪驱动程序模型被用于跟踪闭环仿真所需的路径。附录图 A.3
显示预览跟踪驱动程序模型的框图。 此外,任意路径下面的方法来说明不同助力
转向在车辆运动轨迹的效果。所有的模拟参数列于表 A.1,A.2,A.3。
4. DDAS 系统转矩控制系统设计
4.1. 控制系统的体系结构
通过上述分析清楚知道,助力转向扭矩来自左,右轮之间的转矩差。因此,
必须很好的控制轮毂电机以满足电动助力转向扭矩要求, 这是车速和方向盘角度
的功能。此外,每个轮毂电机驱动力控制功能也可以达到牵引力控制和车辆稳定
控制的功用。然而,牵引控制和车辆稳定控制不是本文的的重点。
图 3 显示驱动力矩控制系统的体系结构,这是由上层和下层控制系统组成。
上层控制系统包括控制 DDAS 子系统,它执行的功能是利用前轮的力矩差来动
力转向,直接横摆力矩控制子系统通过控制后轮驱动力矩进行车辆稳定。 下层控
制系统是牵引控制子系统,保持轮胎在一定区域内打滑。在这整个控制系统, 子
系统需要一些信号,如角度,方向盘和扭矩,偏航率和纵向车辆加速度,车轮转
速和轮毂电机的电流。 其他参数, 如车速和车轮中心速度可以从各种信号传感器
中测量。
剩余21页未读,继续阅读
2021-09-05 上传
2021-08-09 上传
2021-09-04 上传
2021-09-04 上传
2021-09-04 上传
2021-09-04 上传
2021-09-05 上传

lyy18394482058
- 粉丝: 0
- 资源: 5万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 前端协作项目:发布猜图游戏功能与待修复事项
- Spring框架REST服务开发实践指南
- ALU课设实现基础与高级运算功能
- 深入了解STK:C++音频信号处理综合工具套件
- 华中科技大学电信学院软件无线电实验资料汇总
- CGSN数据解析与集成验证工具集:Python和Shell脚本
- Java实现的远程视频会议系统开发教程
- Change-OEM: 用Java修改Windows OEM信息与Logo
- cmnd:文本到远程API的桥接平台开发
- 解决BIOS刷写错误28:PRR.exe的应用与效果
- 深度学习对抗攻击库:adversarial_robustness_toolbox 1.10.0
- Win7系统CP2102驱动下载与安装指南
- 深入理解Java中的函数式编程技巧
- GY-906 MLX90614ESF传感器模块温度采集应用资料
- Adversarial Robustness Toolbox 1.15.1 工具包安装教程
- GNU Radio的供应商中立SDR开发包:gr-sdr介绍
