2013年水中机器人2D仿真水球5VS5高效协作策略:理论与实战
需积分: 9 147 浏览量
更新于2024-08-12
1
收藏 281KB PDF 举报
本文主要探讨了一种针对2013年水中机器人2D仿真水球5VS5比赛的创新比赛策略。作者是卡迪和夏庆锋,他们来自南京大学金陵学院机器人实验室。这项研究的焦点在于如何通过多鱼(机器鱼)的有效协作来提升比赛中的带球和抢球能力。
首先,策略设计从单个机器鱼的动作出发,特别关注四个方面:速度控制、方向控制、顶球动作以及智能反应。速度控制旨在确保机器鱼能够灵活地适应比赛节奏,方向控制则保证了它们对球路的精确判断和追逐。顶球动作的智能化设计使得机器鱼能够更准确地处理球的运动,而智能反应则体现在对对手行为的预测和适应上,增强了战术灵活性。
在单鱼动作的基础上,研究者进一步简化并增加了特殊角度的设计,这有助于机器鱼在复杂场景中进行更高效的协作。动态顶球点的运用使得机器鱼能够根据球的位置变化实时调整顶球策略,而动态最优位置则是为了最大化团队的整体优势,让每个成员能在最适合的位置参与到比赛中。
抢球策略的核心是采用了“领域智能算法”,这是一种模仿生物社会行为的算法,它模拟了鱼群中个体对领地的感知和争夺,使得机器鱼能够协调一致地进行抢球行动。这种协同作战方式显著提高了团队的整体竞技水平。
实验结果显示,这种比赛策略显著提升了机器鱼之间的协作效果,帮助参赛队伍在中国2012年机器人大赛2D仿真水球5VS5项目中赢得了亚军。这表明,该策略不仅适用于理论研究,也在实际比赛中展现了其价值。论文引用了中图分类号TP242(计算机技术)和TP301.6(机器人学),文献标志码A,显示了研究的专业性和学术性。
这篇文章提供了一个实用且具有竞争力的2D仿真水球比赛策略,对于推动水中机器人技术的发展和优化团队运动策略具有重要意义。
2013-12
32(12)
doi:
10.7690/bgzdh.2013.12.017
共~曲曲。化
Ordnance
Industry
Automation
一种
2D
仿真水球
5VS5
比赛策略
卡迪,夏庆锋
(南京大学金陵学院机器人实验室,南京
210089)
•
63
•
摘要:针对水中机器人
2D
仿真水球
5VS5
比赛的规则,提出一种有效的多鱼协作带球与抢球方法。从速度控制、
方向控制、顶球动作和智能反应
4
个方面进行单鱼动作设计,在此基础上进行简化后增加特殊角度的设计,采用动
态顶球点和动态最优位直未设计协作带球,并通过"领域智能算法"进行协作抢球。分析结果证明:该策略能提高
机器鱼之间的协作,并在
2012
中国机器人大赛
2D
仿真水球
5VS5
项目中取得了亚军。
关键词:机器鱼;多鱼协作;路径规划
j
中图分类号
TP242;
TP30
1.
6
文献标志码
A
A Game Strategy
of
2D Simulation Water Polo 5VS5
Bian
Di
,
Xia
Qingfeng
(Laboratory 01 Robotics, Nanjing
Universi
η
Jinling
College, Nanjing 210089, China)
Abstract:
For the rules
of
the game
of
underwater robot
2D
simulation water polo 5vs5, this thesis puts forward a kind
of
more effective method
by
multi-robot
fish's
collaborating dragging and grabbing the ball. The thesis mainly makes a
design
of
a single fish movement from the speed control, direction control, heading action and intelligent response. On the
bases
, the special angle is used to simplify the design. In addition, dynamic head points and dynamic optimal position are
adopted to design dragging the ball
, and grabbing the ball is completed through the "field
of
the intelligent algorithm".
Analysis results show that: the strategy
can
enhance collaboration among robotic fish, and get the runner-up in 2012 China
Robot Contest 2D simulation water polo 5VS5 projec
t.
Key
words:
robot fish; multi-robot fish collaboration; path planning
0
引言
水中机器人比赛是中国机器人大赛的正式项
目,同时也是中国人的首创,更有望成为世界标准
赛事
[1]
。比赛以仿生机器鱼在水池之中进行竞速、
追逐和水球等形式展开。目前,水中机器人比赛主
要分为全局视觉组、自主视觉组、
2D
仿真组和自由
创意组
4
大类。笔者主要对中国水中机器人大赛的
2D
仿真组中水球
(5:5)
比赛策略进行研究,以提高
竞赛水平。
1
2D
仿真水球
5VS5
比赛介绍
2D
仿真水球
(5:5)
为对抗性比赛项目,由
2
支
队伍参与,每支队伍
5
条仿真机器鱼,在仿真场地
上进行类似于足球规则的比赛
[2]
,如图
l
所示。
其中,仿真机器鱼由
1
个弧形鱼头、
1
个矩形
鱼体、
3
个首尾相接底边长递减的等腰梯形鱼尾、
1
个月牙形尾鳝以及
2
个扇形胸鳝构成,比赛用球为
半径为
58mm
的圆形。各自队伍中第
1
号仿真机器
鱼为自由队员,可以在整个场地范围内游动,第
2
、
3
号仿真机器鱼为后防队员,不能越过进攻线;第
4
、
收稿日期
2013-06-30
,
f~
回日期
2013-07-15
5
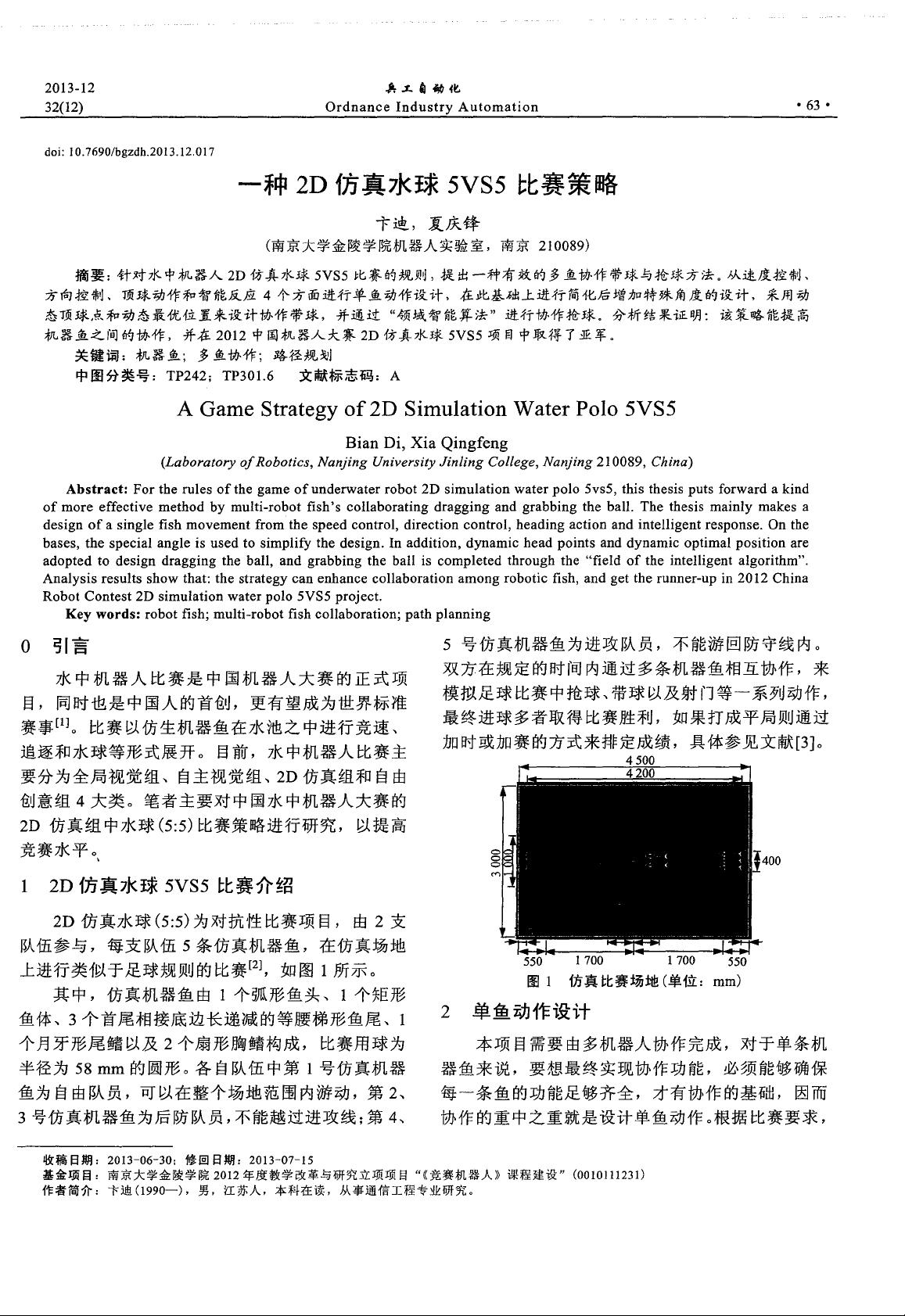
号仿真机器鱼为进攻队员,不能游回防守线内。
双方在规定的时间内通过多条机器鱼相互协作,来
模拟足球比赛中抢球、带球以及射门等一系列动作,
最终进球多者取得比赛胜利,如果打成平局则通过
加时或加赛的方式来排定成绩,具体参见文献
[3J
。
图
1
仿真比赛场地(单位
mm)
2
单鱼动作设计
400
本项目需要由多机器人协作完成,对于单条机
器鱼来说,要想最终实现协作功能,必须能够确保
每一条鱼的功能足够齐全,才有协作的基础,因而
协作的重中之重就是设计单鱼动作。根据比赛要求,
基金项目
z
南京大学金陵学院
2012
年度教学改革与研究立项项目叫竞赛机器人》课程建设"
(001011123
1)
作者简介
z
下迪(1
990
一),男,江苏人,本科在读,从事通信工程专业研究。
下载后可阅读完整内容,剩余3页未读,立即下载
2021-08-14 上传
2024-02-15 上传
2021-05-31 上传
2023-04-29 上传
2023-04-29 上传
2023-08-11 上传
2023-11-25 上传
2023-08-04 上传
2024-01-12 上传

weixin_38559569
- 粉丝: 3
- 资源: 948
 我的内容管理
展开
我的内容管理
展开







最新资源
- JavaScript实现的高效pomodoro时钟教程
- CMake 3.25.3版本发布:程序员必备构建工具
- 直流无刷电机控制技术项目源码集合
- Ak Kamal电子安全客户端加载器-CRX插件介绍
- 揭露流氓软件:月息背后的秘密
- 京东自动抢购茅台脚本指南:如何设置eid与fp参数
- 动态格式化Matlab轴刻度标签 - ticklabelformat实用教程
- DSTUHack2021后端接口与Go语言实现解析
- CMake 3.25.2版本Linux软件包发布
- Node.js网络数据抓取技术深入解析
- QRSorteios-crx扩展:优化税务文件扫描流程
- 掌握JavaScript中的算法技巧
- Rails+React打造MF员工租房解决方案
- Utsanjan:自学成才的UI/UX设计师与技术博客作者
- CMake 3.25.2版本发布,支持Windows x86_64架构
- AR_RENTAL平台:HTML技术在增强现实领域的应用
