平面双连杆柔性机器人自适应模糊力-位置控制策略研究
需积分: 10 193 浏览量
更新于2024-09-06
收藏 303KB PDF 举报
本文主要探讨了平面双连杆受限柔性机器人臂的自适应模糊力/位置控制问题。该研究针对一类特殊的柔性机器人设计了一种创新的控制策略,旨在解决机器人在高速定位、轻质空间飞行器设计等应用中遇到的振动抑制和控制难题。传统方法往往依赖于精确的数学模型,但在实际操作中,环境扰动和可变荷载的存在使得控制设计变得复杂,因此,寻求一种无需精确模型并能自我适应变化的控制器成为研究的重点。
本文提出了一种自适应模糊控制方案,采用结构分解技术对模糊推理系统进行了简化,这有助于减少控制器的复杂性。通过梯度法,实现了对机器人系统末端混合力和位置的实时调整,实现了对受限柔性机器人系统动态性能的优化。这种方法的优势在于它能够自动适应不确定性和环境变化,降低了对系统精确数学模型的依赖。
论文首先介绍了柔性机器人及其在相关领域的应用背景,强调了现有控制算法存在的局限性,然后详细阐述了新型自适应模糊控制的设计思路和技术细节。作者通过计算机仿真实验验证了这一控制方案的有效性,展示了在面对环境扰动时,该方案能够确保机器人臂的稳定性和准确性。
此外,本文还提到了研究的资助情况,包括国家自然科学基金和湖南省自然科学基金的支持,以及论文的接收日期。这项研究对于提高受限柔性机器人臂的控制性能和鲁棒性具有重要意义,为柔性机器人在工业和航天领域的广泛应用提供了新的控制解决方案。
式中
Η
是第一根连杆的关节转角
Η
δ
是
Η
的期望值
是相应于约束方程的
乘子
Κ
δ
是
Κ
的期望值
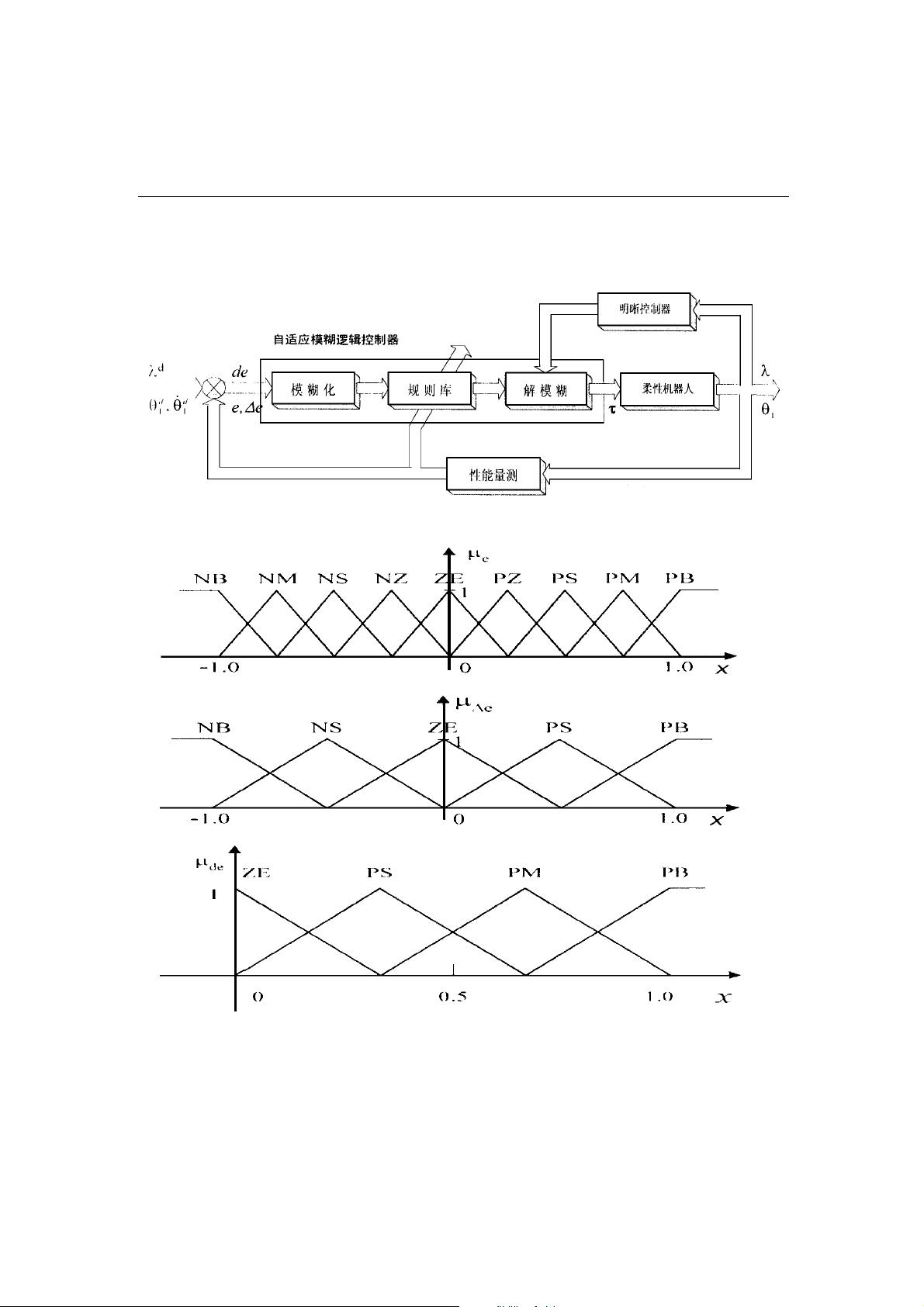
该闭环系统各环节的功能和设计步骤将在以下各小节结合图
详加说明和阐
述
图
柔性机器人闭环自适应模糊控制系统
图
各输入子集
ε
∃ ε
和
δε
的模糊隶属函数
31
模糊化
在模糊控制应用中
模糊化主要处理以自然语言表达专家经验时所出现的含糊现象和不
精确性
这在处理客观或主观不确定性信息时具有十分重要的作用
一般而言
模糊系统往往
由一组基于先验知识的语句描述
这些语言术语总是以条件语句
/
ƒ
×∞
0
的形式表达
其
第
卷第
期 樊晓平
平面双连杆受限柔性机器人臂的自适应模糊力
位置控制
剩余10页未读,继续阅读
2021-09-21 上传
2021-08-14 上传
2023-10-27 上传
2021-09-26 上传
2019-09-25 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-09-21 上传

weixin_38744270
- 粉丝: 329
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 小程序源码 MyNFCDemon.rar
- 旅行app 登录 注册页面UI .xd素材下载
- ASP简易网络存储系统的设计与实现(源代码+论文).rar
- 园林绿化景观施工组织设计-某园林施工组织设计 (2)
- protoc-v26.1-linux 和 windows资源包
- tcp-handshake:演示TCP的3路Hanshake
- 澡堂预订微信小程序-毕业设计,基于微信小程序+SSM+MySql开发,源码+数据库+毕业论文+视频演示
- 基于Kinect的骨架提取及姿势识别
- Excel-VBA实用技巧范例-自定义Excel操作选项.zip
- BlueBox-Webpage:包含我们针对CS 476和486的团队网页的内容
- MATLAB数据字典生成代码-dsc-introducing-python-libraries-onl01-dtsc-ft-070620:ds
- ASP网上书店的设计与实现(源代码+论文).rar
- 智能家居app ui .sketch素材下载
- 课程预约在线报名辅导班微信教育小程序源码.zip
- Q1直升机SW格式.rar
- What-makes-a-good-front-end-engineer:如何成为一个优秀的前端工程师
