独轮机器人控制系统设计与动态仿真
版权申诉
71 浏览量
更新于2024-06-21
收藏 2.73MB DOCX 举报
"独轮机器人——控制系统设计 .docx"
独轮机器人是一种极具挑战性的智能设备,其控制系统设计涉及复杂的动力学分析和精密的传感器融合。文章深入探讨了独轮机器人的运动控制,从硬件选型到软件算法设计,旨在创建一个稳定且响应灵敏的平衡系统。
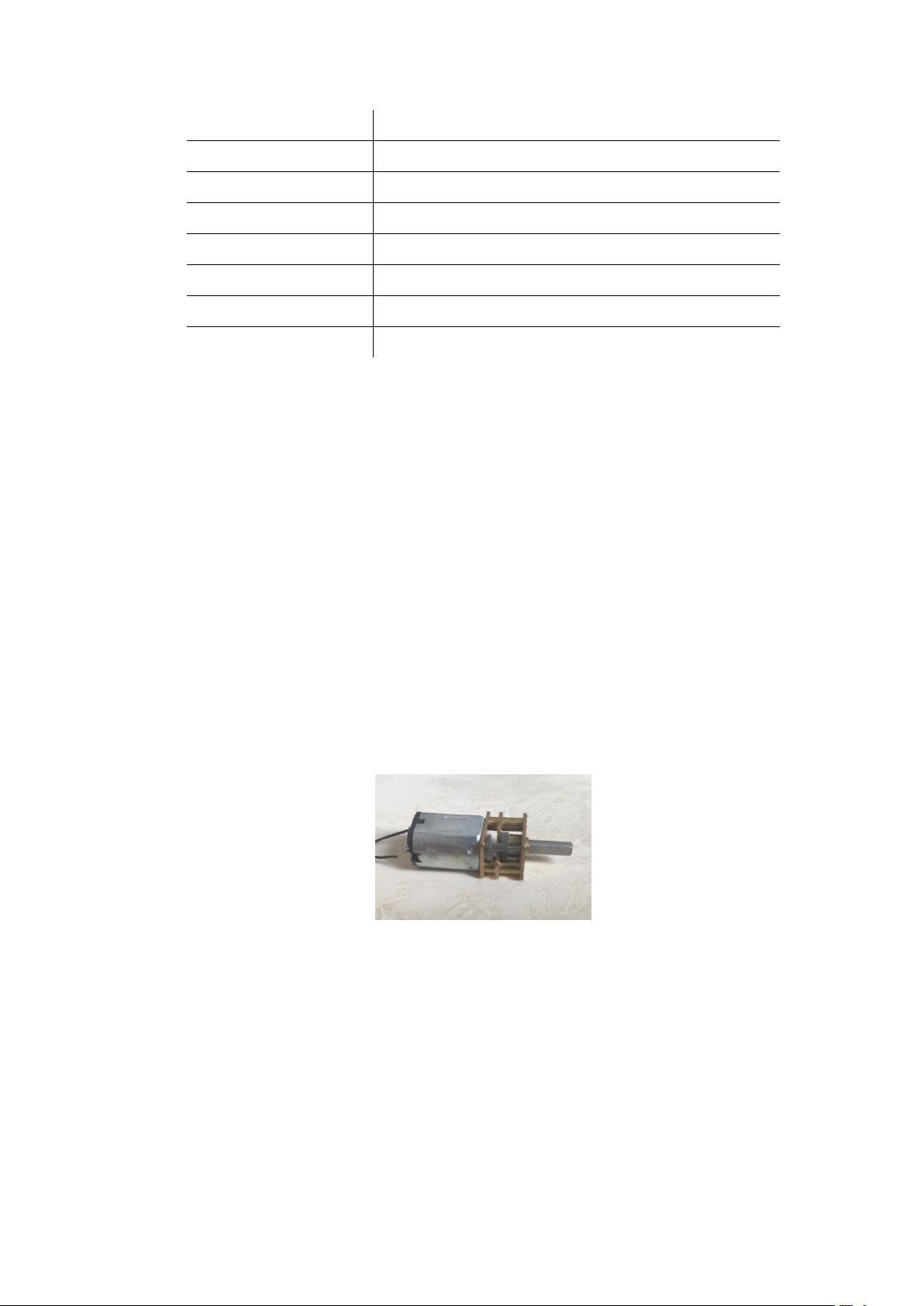
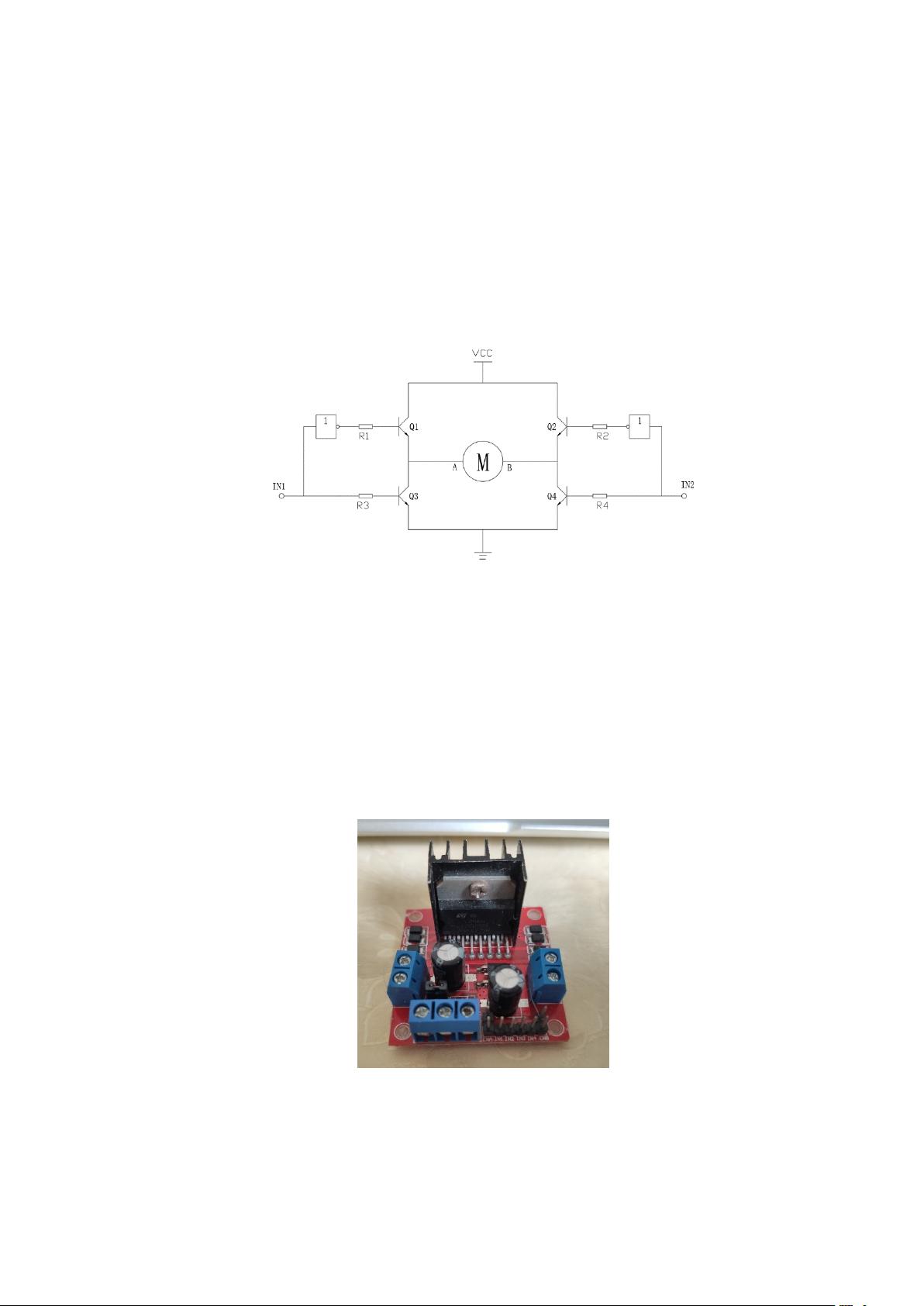
首先,文章介绍了关键组件的选择。mpu9250电子陀螺仪用于实时监测机器人的姿态变化,确保精确的运动数据采集。GA12-N20电机作为动力源,为独轮机器人提供必要的驱动力。L298N电机驱动模块则用来驱动电机,实现高效能的动力传递。电源部分选用两节18650电池,保证足够的运行时间。整个系统的控制中枢是arduinouno板,它负责接收和处理各种传感器数据,执行控制算法。
在数据处理方面,由于陀螺仪数据存在偏差和噪声,文章提出了基于电容滤波原理的算法。通过数学建模和离散化处理,设计出适用于计算机的滤波算法。使用MATLAB软件进行初步验证,并在实际arduino平台上进行实验,证明了该算法能够有效地去除噪声,提高数据的准确性。通过进一步的数据处理,得到角速度、角加速度和角度等关键运动参数。
动力学模型构建是控制设计的关键。独轮机器人的多变量强耦合特性被分解为前后倾倒和左右倾倒两个独立的运动模型。对于左右倾倒,设计了一个PD控制器,但在仿真中发现无法区分倾倒与回摆。为解决这一问题,引入了积分项,即角度参数,使得系统能识别正确的恢复位置。改进后的控制器能够准确区分这两种情况,使独轮机器人能稳定站立。
对于前后倾倒的控制,文章采用了PID控制策略,结合角度、角速度和角加速度的三组数据,以适应位移变化。通过动画模拟的仿真程序,可以看到PID控制系统能够有效地维持独轮机器人的平衡。
此外,为了提升独轮机器人的实用性,文章还提出了一种无线充电装置的设计,使机器人在不使用时能够自动充电,增加了其应用场景的便利性。
总结来说,这篇文档详细阐述了独轮机器人的控制系统设计,包括硬件选型、数据处理、动力学建模、控制算法设计以及系统优化,展现了从理论到实践的完整设计流程,对于理解单轮平衡机器人的工作原理和技术实现具有重要参考价值。
5
3 电路元器件选型
3.1 传感器
对独轮机器人的工作原理进行分析可知,独轮机器人需要保持直立状态,则控制系
统的核心输入参数是其角速度。电子陀螺仪是最常用的读取角速度的传感器。电子陀螺
仪又叫加速度计、角速度传感器,因为电子陀螺仪模块通常是集成测加速度、测角速度
等功能的传感器。因运用场景不同,有些电子陀螺仪传感器模块甚至集成了测温度,测
气压、测地磁等功能。
在电子陀螺仪众多的型号中,mpu6050 传感器模块是一款比较常见比较常用的测角
速度的传感器模块,其核心是一颗 mpu6050 芯片。该芯片是一款六轴的电子陀螺仪,可
检测三个轴向角速度以及三个轴向的加速度。
加速度测量是通过电容的改变测得。内置小型的特殊装置制作的电容,当外部受到
力的作用时,会使得小型的特殊装置发生位移引起电容电极距离改变,从而引起电容大
小的改变。角速度的测量则是利用了科里奥利效应,通过检测科里奥利力大小来获得角
速度。
mpu6050 通过 I2C 方式进行通信。角速度测量可选量程有
±
250°/𝑠
、
±
500°/𝑠
、
±
1000°/𝑠
、
±
2000°/𝑠
,加速度测量可选量程有
±
2𝑔
、
±
4𝑔
、
±
8𝑔
、
±
16𝑔
,数据
输出为十六位数据。对于独轮机器人的是使用是完全可以满足的。
本文所设计的独轮机器人对电子陀螺仪的精度、体积、功耗等均没有严格要求,市
面上的大部分电子陀螺仪均可服务于本文所设计的独轮机器人。故从经济的角度出发,
mpu6050 模块是最适合本独轮机器人的一款六轴电子陀螺仪。
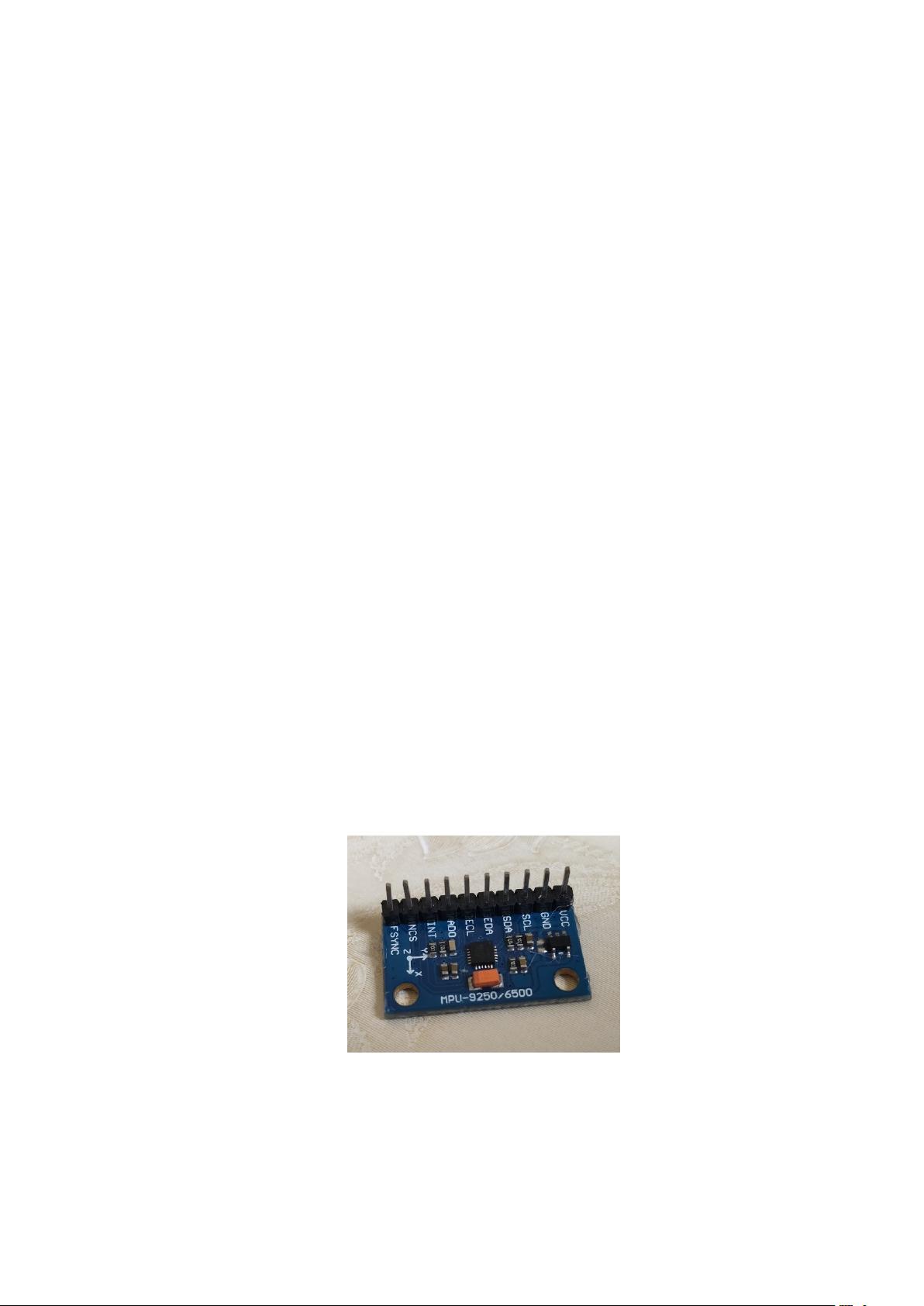
由于在笔者设计本独轮机器人时,恰巧闲置着一个型号为 mpu9250 的电子陀螺仪模
块。
图 3.1 mpu9250 模块实物
图 3.1 是 mpu9250 模块的实物图,它是一款九轴的电子陀螺仪模块,其核心为一颗
mpu9250 芯片。其基本信息见表 3.1 所示。
表 3.1 mpu9250 基本信息
剩余51页未读,继续阅读
2022-06-30 上传
2023-09-08 上传
2024-03-09 上传
2023-07-03 上传
2019-09-03 上传

南抖北快东卫
- 粉丝: 80
- 资源: 5587
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入浅出:自定义 Grunt 任务的实践指南
- 网络物理突变工具的多点路径规划实现与分析
- multifeed: 实现多作者间的超核心共享与同步技术
- C++商品交易系统实习项目详细要求
- macOS系统Python模块whl包安装教程
- 掌握fullstackJS:构建React框架与快速开发应用
- React-Purify: 实现React组件纯净方法的工具介绍
- deck.js:构建现代HTML演示的JavaScript库
- nunn:现代C++17实现的机器学习库开源项目
- Python安装包 Acquisition-4.12-cp35-cp35m-win_amd64.whl.zip 使用说明
- Amaranthus-tuberculatus基因组分析脚本集
- Ubuntu 12.04下Realtek RTL8821AE驱动的向后移植指南
- 掌握Jest环境下的最新jsdom功能
- CAGI Toolkit:开源Asterisk PBX的AGI应用开发
- MyDropDemo: 体验QGraphicsView的拖放功能
- 远程FPGA平台上的Quartus II17.1 LCD色块闪烁现象解析
