ICE-BA论文解析与GBA代码详解:视觉IMU联合优化
需积分: 0 55 浏览量
更新于2024-07-01
收藏 1.71MB PDF 举报
"ICE-BA论文分析及GBA代码解析by崔华坤_5.01"
这篇资源主要探讨了ICE-BA(Incremental Camera-Ego and Landmark Bundle Adjustment)算法,这是一种在SLAM(Simultaneous Localization And Mapping,同时定位与建图)领域常用的优化方法。崔华坤的分析涵盖了从理论到实践的多个方面,包括BA的求解过程、视觉和IMU联合约束以及因子图分析法。
1. **BA求解**:在SLAM中,BA被用来通过最小化误差来优化相机位姿和路标点的估计。它通常基于高斯-牛顿法,首先建立正常方程(JTJδX=JTε),其中J是残差关于所有优化变量X的雅可比矩阵,ε是残差向量。
2. **视觉约束**:论文详细介绍了两种视觉约束参数化方式。第一种是xyz参数化,它直接处理图像像素坐标与3D空间点的关系。第二种是逆深度参数化,用以处理深度不确定性问题,通过逆深度作为路标点的表示,能够更好地处理远距离观测。
3. **视觉和IMU联合约束**:结合视觉信息和惯性测量单元(IMU)数据可以提高定位精度和鲁棒性。这种联合约束利用了IMU的连续性和视觉的局部一致性,形成更稳定的系统。
4. **[H|b]矩阵的数学形式**:在非线性优化中,[H|b]矩阵是雅可比矩阵和残差的堆叠,用于描述目标函数的线性化部分,它是求解过程中线性系统的组成部分。
5. **因子图分析法**:因子图是一种图形模型,用于表示SLAM中的观测因子(如视觉约束)、运动因子(IMU约束)和其他先验因子。通过最小化因子图中所有边的权重之和,可以实现全局优化。
6. **ICE-BA的变量和代码解析**:内容还包括对ICE-BA中关键变量的理解,如m_Zs和m_zs,以及代码解析,如更新视觉约束、IMU约束、位姿先验、运动先验、路标点先验以及Schur补的计算和解算相机位姿和路标点的过程。
整个文档深入浅出地解释了ICE-BA的工作原理,提供了对SLAM优化问题的实用理解,并通过代码解析帮助读者理解实际实现过程。对于希望理解和实施BA算法,特别是融合视觉和IMU数据的SLAM系统的开发者来说,这是一个宝贵的资源。
7
可计算得到 Hession 如下所示(2.4 部分中将详细介绍下图的数学求解过
程):
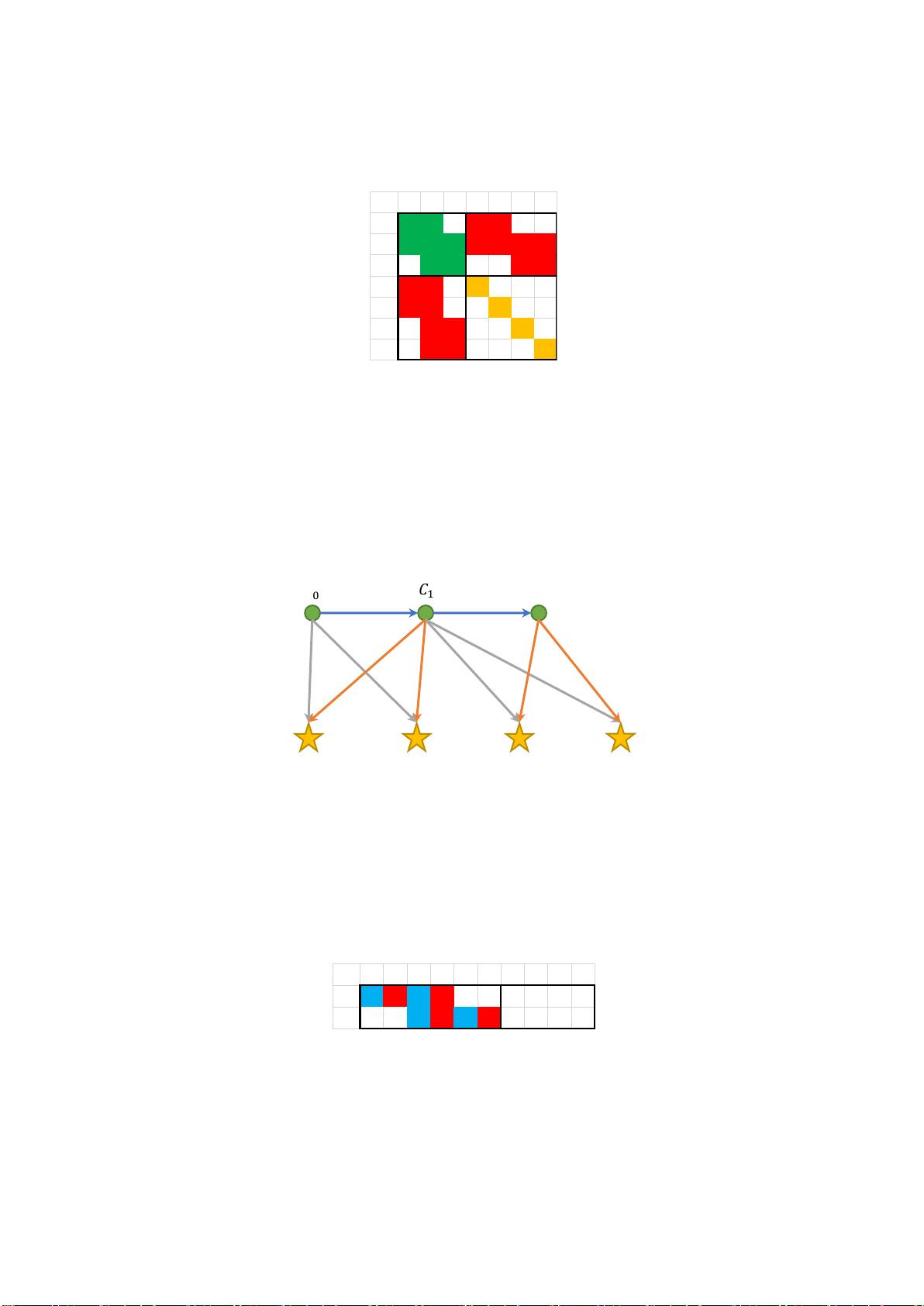
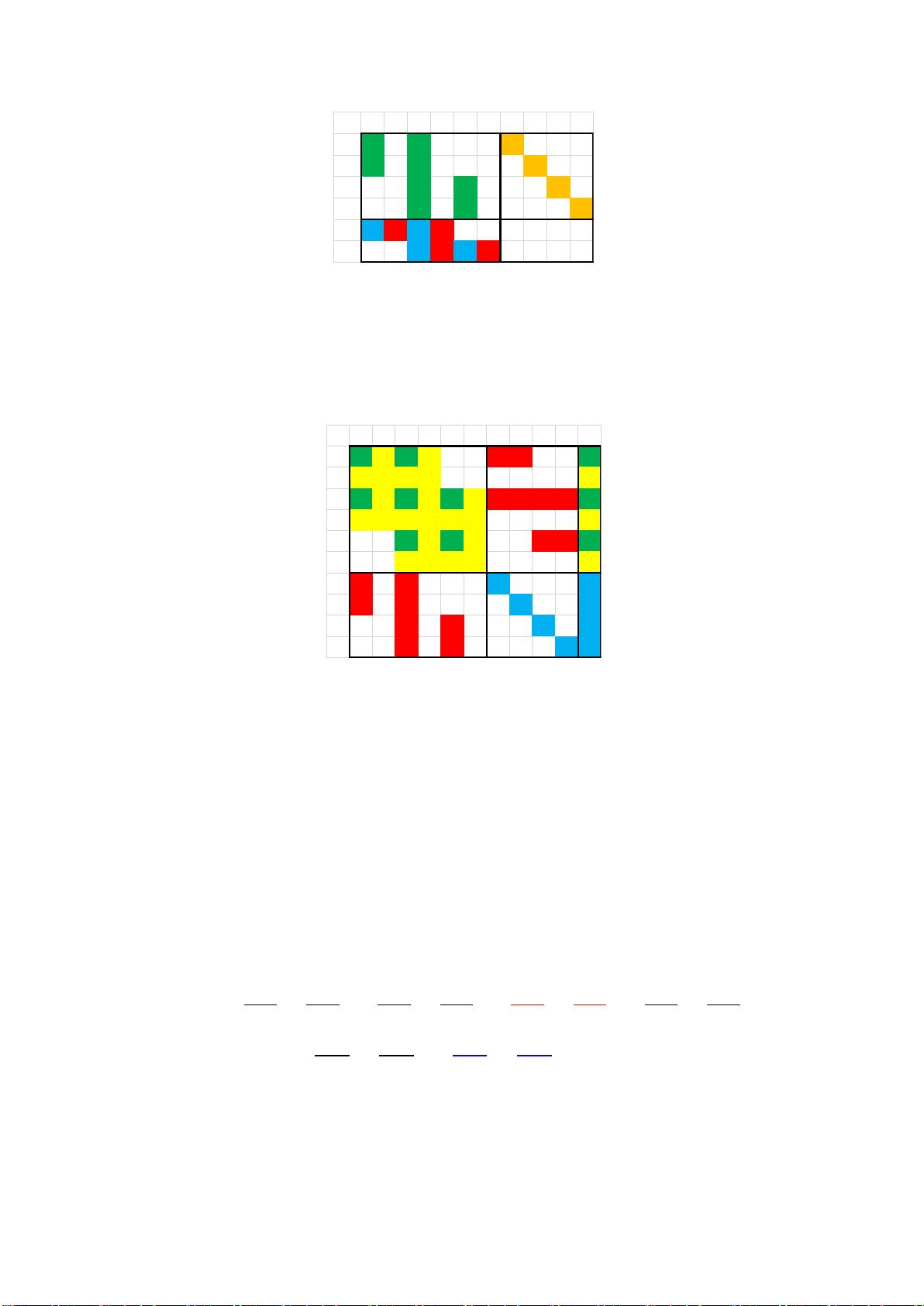
图 7 逆深度参数下的 Hession 矩阵
2.3 视觉和 IMU 联合约束
VIO 中除了视觉约束还需要考虑 IMU 约束,IMU 引入了相邻相机间的位置、
旋转、速度、Bias 的约束。那么,对于我们在图 5 的基础上添加两个 IMU 约束,
如下图中蓝色线所示:
图 8 VIO 中的 IMU 约束
上图中 IMU 约束的 Jacobian 如下所示,其中蓝色小方块为 IMU 残差关于相
机位姿的 Jacobian,大小为 15×6;红色小方块为 IMU 残差关于相机运动的
Jacobian,大小为 15×9:
图 9 IMU 约束的 Jacobian 矩阵
将 IMU 约束和视觉约束合并后的 Jacobian 为:
T0 T1 T2 x0 x1 x2 x3
T0
T1
T2
x0
x1
x2
x3
T0 M0 T1 M1 T2 M2 x0 x1 x2 x3
rb01
rb12
rb
01
rb
12
rv
10
rv
11
rv
22
rv
23
剩余36页未读,继续阅读
2020-12-14 上传
112 浏览量
137 浏览量
2021-10-04 上传
2019-11-13 上传
2021-10-12 上传
2021-10-13 上传

刘璐璐璐璐璐
- 粉丝: 36
- 资源: 326
 我的内容管理
展开
我的内容管理
展开







最新资源
- 磁性吸附笔筒设计创新,行业文档精选
- Java Swing实现的俄罗斯方块游戏代码分享
- 骨折生长的二维与三维模型比较分析
- 水彩花卉与羽毛无缝背景矢量素材
- 设计一种高效的袋料分离装置
- 探索4.20图包.zip的奥秘
- RabbitMQ 3.7.x延时消息交换插件安装与操作指南
- 解决NLTK下载停用词失败的问题
- 多系统平台的并行处理技术研究
- Jekyll项目实战:网页设计作业的入门练习
- discord.js v13按钮分页包实现教程与应用
- SpringBoot与Uniapp结合开发短视频APP实战教程
- Tensorflow学习笔记深度解析:人工智能实践指南
- 无服务器部署管理器:防止错误部署AWS帐户
- 医疗图标矢量素材合集:扁平风格16图标(PNG/EPS/PSD)
- 人工智能基础课程汇报PPT模板下载
