六自由度机器人运动控制与轨迹规划在航空叶片测量中的研究
需积分: 32 88 浏览量
更新于2024-07-14
1
收藏 28.3MB PDF 举报
"这篇硕士论文主要探讨了六自由度机器人在运动控制和轨迹规划方面的研究,以SP.CER10型号的六自由度工业机器人为例,涉及了机器人运动学建模、工作空间分析、轨迹规划算法、硬件控制、优化算法、虚拟样机设计以及人机交互界面等多个方面。"
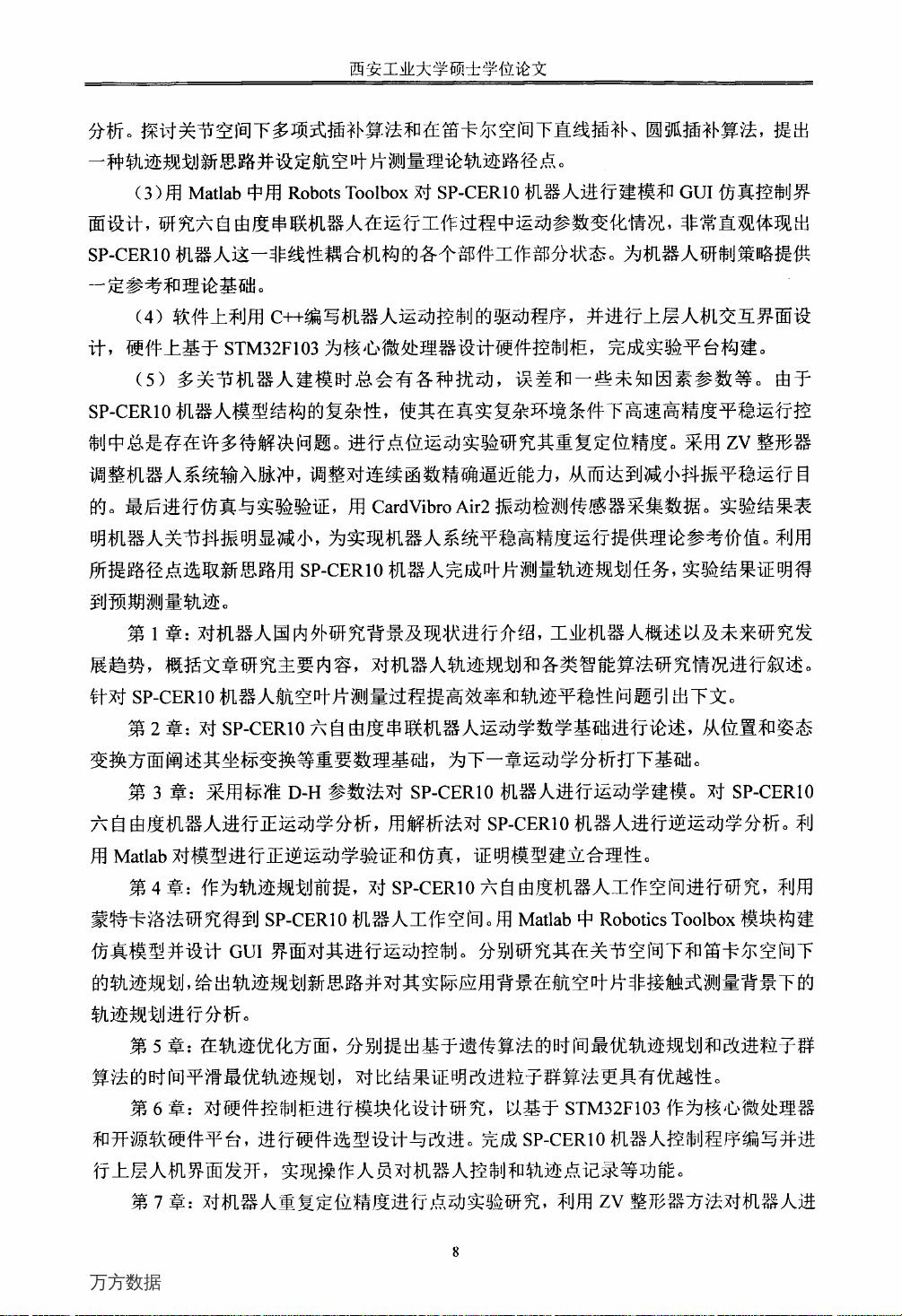
在工业制造的现代化进程中,工业机器人扮演着至关重要的角色,而运动控制和轨迹规划是确保机器人高效稳定工作的核心技术。针对SP.CER10六自由度机器人在航空叶片测量中的应用,论文深入研究了以下几个关键知识点:
1. **运动学研究**:首先,论文基于SP.CER10机器人,阐述了运动学的基础理论,包括坐标变换和位置姿态描述。运用D-H参数法构建了机器人在连杆坐标系下的运动学模型,并通过Matlab进行正逆运动学的求解和验证,确保了模型的准确性。
2. **轨迹规划**:通过蒙特卡洛法分析了SP.CER10机器人的工作空间特性。针对实际应用场景,论文探讨了关节空间的多项式插补算法和笛卡尔空间下的直线插补、圆弧插补算法,并进行了仿真验证,这些规划方法对于航空叶片的非接触测量至关重要。
3. **优化算法**:在轨迹规划中,优化算法的应用可以进一步提升机器人的作业效率和平稳性。论文可能涉及到各种优化策略,如遗传算法、粒子群优化等,以寻找最优路径。
4. **硬件控制柜搭建**:为了实现机器人的精确控制,必须有相应的硬件支持。这部分内容可能涵盖了控制系统的硬件配置、信号处理和实时控制等。
5. **虚拟样机设计**:虚拟样机技术允许在真实操作前进行仿真测试,论文可能描述了如何构建SP.CER10机器人的虚拟模型,以便进行运动性能和控制策略的模拟。
6. **人机界面设计**:一个直观易用的人机界面对于操作者与机器人之间的交互至关重要。这部分可能涉及界面设计原则、用户需求分析以及交互逻辑的设计。
7. **仿真实验研究**:通过仿真实验,论文验证了上述理论和方法的有效性,为实际应用提供了可靠依据。
这篇论文全面覆盖了六自由度机器人在运动控制和轨迹规划领域的关键技术和实践应用,对于提升机器人在精密测量等领域的性能具有重要意义。
万方数据

剩余98页未读,继续阅读
2021-06-27 上传
2021-08-14 上传
2021-08-14 上传
2021-08-14 上传
2021-08-14 上传
2021-08-14 上传
2021-08-14 上传
2021-06-29 上传
2021-08-12 上传

qq_28590657
- 粉丝: 0
- 资源: 15
 我的内容管理
展开
我的内容管理
展开







最新资源
- Android studio git 最新版
- pomodoro-app-ReactJs
- uitzendinggemist:错过广播下载器
- eclipse开发工具开发的都市信息供求网.zip
- lodashProject:项目-来自Codecademy后端课程的lodash
- N76E003 ISP源码及应用程序-电路方案
- 挑战每周1
- GBaseMigrationToolkit_8.5.22.0_build2_Longxin64.zip
- security-on-github
- Objects
- Simple-Storj-Uploader:使用 Storj web-core API 上传文件到 Storj 网络
- MA-Proyec:最终定额罚款
- keygen矢量图优化
- upptime
- ADI ADUC-H7020开发板demo代码/用户手册/原理图-电路方案
- 电商项目商品规格参数表设计SKU和SPU表设计
