51单片机串行通信详解:同步与异步,单工半双工全双工
83 浏览量
更新于2024-09-02
收藏 314KB PDF 举报
51单片机串口通信知识深入解析
在现代信息技术中,通信方式的选择对于数据传输的效率和成本至关重要。51单片机作为一种常见的微控制器,在设计和应用中广泛采用串行通信技术。串行通信与并行通信相比,具有明显的优缺点。
串行通信的基础概念包括:
1. **定义**:
- 串行通信是指数据按位顺序逐个通过单一数据线传输,与并行通信的多条数据线同时传输不同,它简化了硬件连接,尤其适合长距离和低成本的传输。
2. **类型**:
- **同步通信**:数据传输中,发送方和接收方的时钟必须保持严格同步,以确保每个位的正确传输。同步通信使用特定的位组合作为起始和结束标志,如"01111110",提高了传输效率但对硬件要求较高。
- **异步通信**:无需精确的时钟同步,字符间的间隔不固定,每个字符内部的位间隔保持同步。异步通信简单实现,但数据冗余较高,传输效率较低。
3. **传输方向**:
- **单工**:数据只能在一个方向上传输,适用于简单的单向控制应用。
- **半双工**:数据可以在两个方向上传输,但必须交替进行,如双向通信但不能同时发送和接收。
- **全双工**:最高级别的通信方式,数据可以同时双向传输,允许实时交互。
在51单片机中,串口通信通常使用UART(Universal Asynchronous Receiver/Transmitter,通用异步接收器/发送器)模块,它支持异步和同步通信模式。选择哪种模式取决于应用场景的需求,例如,如果对实时性要求较高,可能会选择同步通信;而如果成本和功耗是主要考虑因素,异步通信可能是更合适的选择。
了解这些基础知识后,开发人员可以根据项目需求配置适当的波特率、数据位数、停止位和校验位,以及选择合适的同步或异步模式来优化51单片机的串口通信性能。实践过程中,可能还需要处理串口通信的错误检测、数据缓存和中断管理等问题,以确保通信的稳定性和可靠性。
51单片机串口通信知识单片机串口通信知识
通信的基本方式可分为并行通信和串行通信两种。 并行通信通常是将数据字节的各位用多条数据线同时进行传
送。并行通信控制简单、传输速度快;由于传输线较多,长距离传送时成本高且接收方的各位同时接收存在困
难。串行通信是将数据字节分成一位一位的形式在一条传输线上逐个地传输。
1、串行通信概述
(1)计算机通信是指计算机与外部设备或计算机与计算机之间的信息交换。
• 通信的基本方式可分为并行通信和串行通信两种。
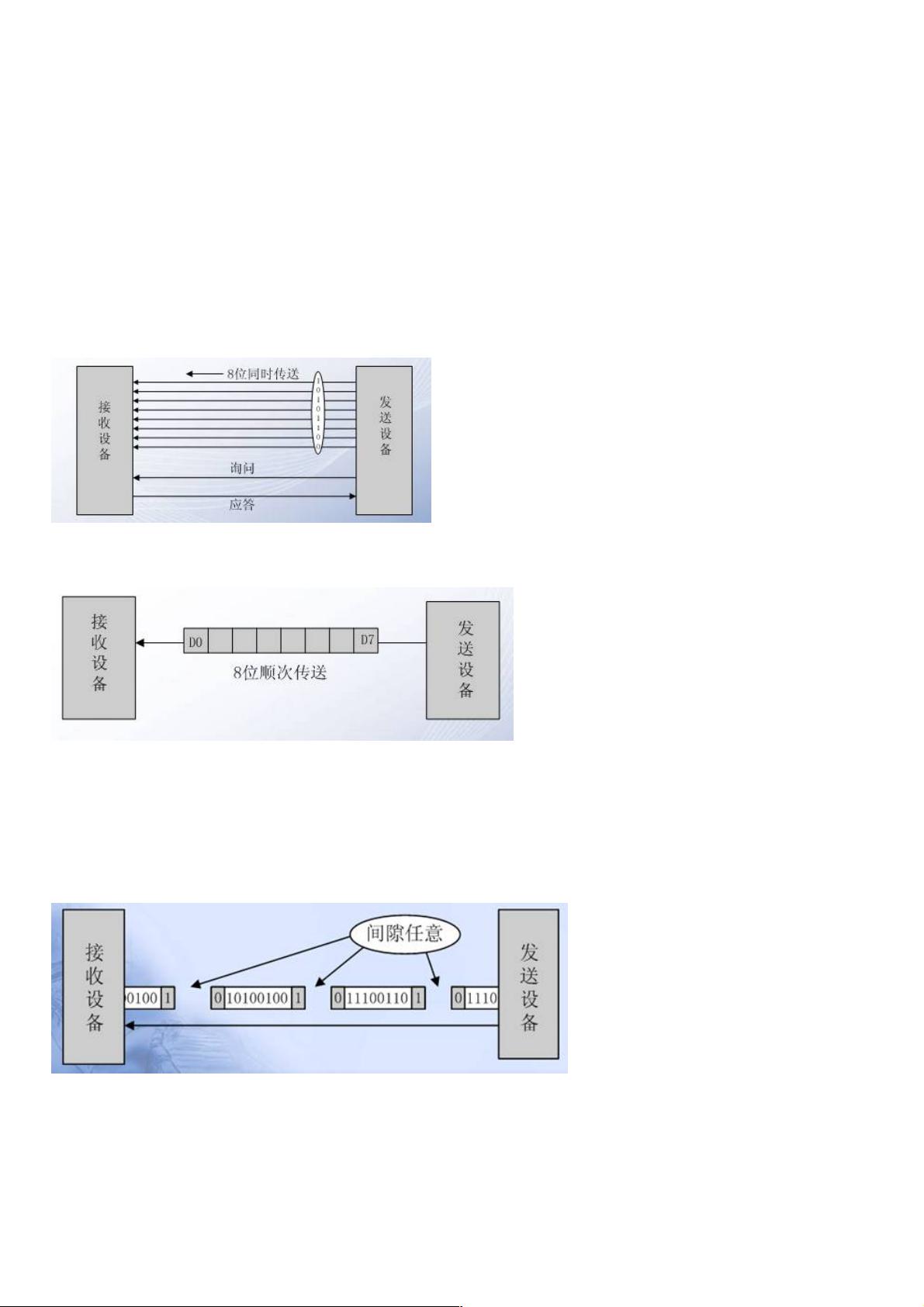
• 并行通信通常是将数据字节的各位用多条数据线同时进行传送,如图1所示。并行通信控制简单、传输速度快;由于传输线
较多,长距离传送时成本高且接收方的各位同时接收存在困难。
•
串行通信是将数据字节分成一位一位的形式在一条传输线上逐个地传输,如图2所示。串行通信的特点:传输线少,长距离传
送时成本低,且可以利用电话网等现成的设备,但数据的传送控制比并行通信复杂。
目前串行通信在单片机双机、多机以及单片机与PC机之间的通信等方面得到了广泛应用。
(2)同步通信和异步通信
1、异步通信
异步通信是指通信的发送与接收设备使用各自的时钟控制数据的发送和接收过程。为使双方的收发协调,要求发送和接收设备
的时钟尽可能一致。
异步通信是以字符(构成的帧)为单位进行传输,字符与字符之间的间隙(时间间隔)是任意的,但每个字符中的各位是以固
定的时间传送的,即字符之间不一定有“位间隔”的整数倍的关系,但同一字符内的各位之间的距离均为“位间隔”的整数倍。
下载后可阅读完整内容,剩余5页未读,立即下载
429 浏览量
3733 浏览量
260 浏览量
132 浏览量
2013-09-06 上传
1407 浏览量
1196 浏览量
135 浏览量
127 浏览量

weixin_38638002
- 粉丝: 4
- 资源: 977
 我的内容管理
展开
我的内容管理
展开







最新资源
- 可绘数据图接收软件.rar
- sharp.js:HTML5 Javascript 游戏引擎
- ExpenseTracker:重大项目
- console-package-builder:[只读]用于加速构建命令行应用程序的软件包
- labview读取和保存表格数据示例程序.zip
- 湖南综合性劳动合同
- 3d-slider:3D滑杆
- 毕业设计没有源码-HandongTime:HandongTime
- cs50-pong
- EPLAN_P8_IndraDrive_IndraDyn_2013-04.zip
- FrontEnd
- fgo游戏数据API
- FUSE-freepascal-开源
- 定时打铃器的项目设计实验
- 基于web的超市管理系统的设计与实现.rar
- printf:printf功能
