CAN总线详解:工作原理与显隐性理解教程
CAN总线教程深入解析
CAN (Controller Area Network) 是一种串行通信总线标准,专为汽车电子应用设计,但也广泛应用于工业自动化和其他领域。本教程旨在帮助学习者理解CAN总线的工作原理、数据通信机制以及关键概念。
首先,CAN总线的工作原理涉及报文广播。当一个节点发送数据时,它会在总线上广播,其他节点无论是否为目标接收者都会接收到。报文的标识符(ID)由11位组成,决定了报文的优先级,确保同一系统中不会出现冲突。当多个节点竞争总线使用权时,这一点尤为重要。
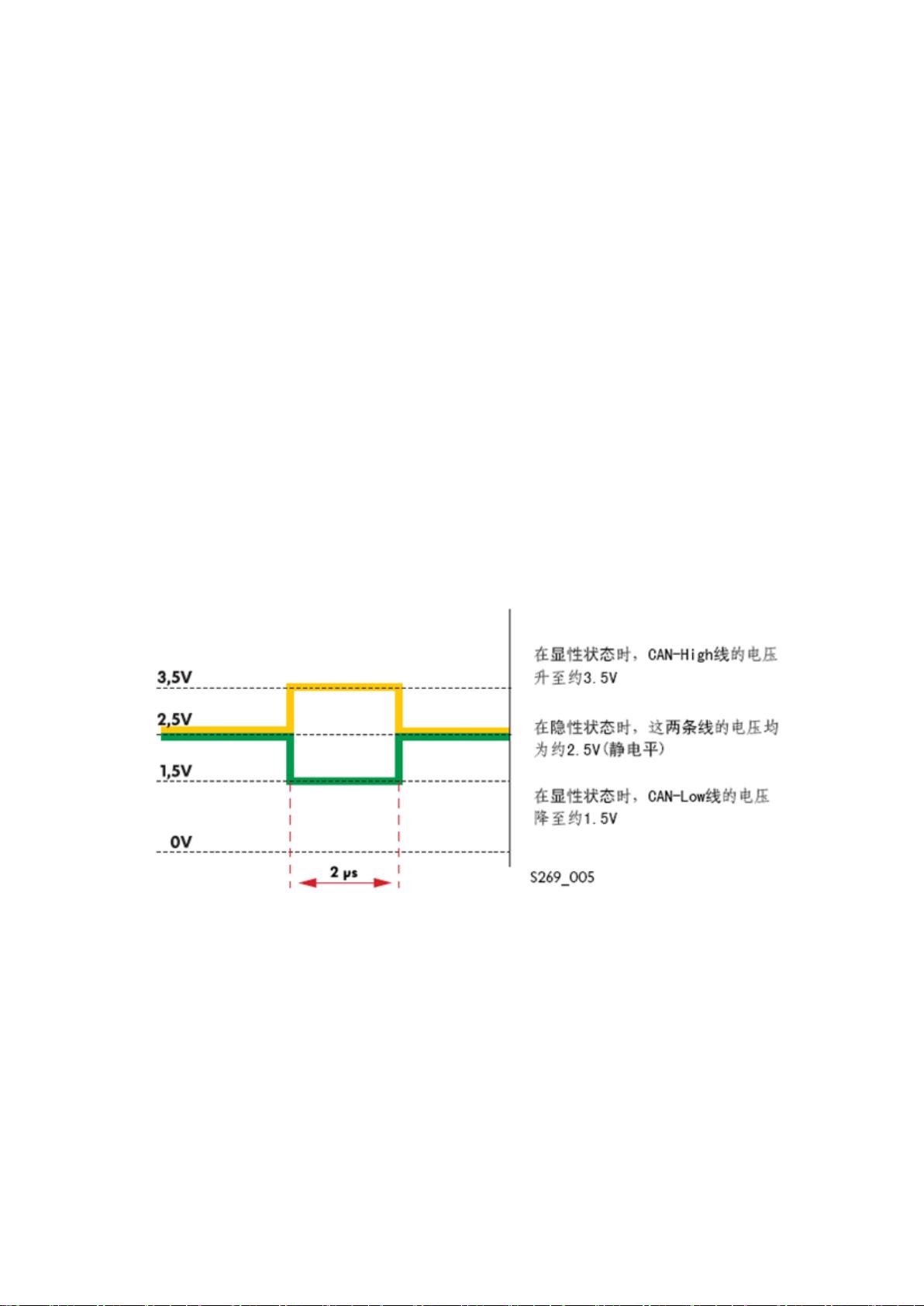
"显性"和"隐性"是CAN总线通信中的核心术语。CAN总线有两根信号线:CAN_High和CAN_Low。在静止状态下,它们的电平保持在约2.5伏的静电平,即隐性状态。当数据被发送时,CAN_High线电压上升至少1V,而CAN_Low线下降1V,形成显性状态,此时的电压差提供了信号识别的基础。逻辑1表示隐性,逻辑0表示显性,通过电压差进行数据传输。
在实际应用中,控制单元通过收发器连接到CAN总线上,收发器内部包含一个差动信号放大器,它能够放大CAN_High和CAN_Low之间的电压差,并将接收到的数据转换为电信号。报文是CAN总线传输的核心内容,为了确保数据完整性,报文需要按照特定的格式组织,包括启动符、仲裁段、数据段和停止符等。
报文的正确传输涉及到错误检测和处理机制,CAN总线采用了循环冗余检查(CRC)和应答帧来检测和纠正潜在的错误。此外,CAN总线还支持不同速度等级,如CAN-Lite用于低速率场景,而CAN-FD(Flexible Data Rate)则提供更高的数据传输速率。
学习CAN总线需要理解其基础结构、工作模式、数据传输方式以及错误检测策略。掌握这些知识点对于从事汽车电子、工业自动化等领域的工程师来说至关重要。通过实践项目和不断练习,可以更好地掌握这一技术并将其应用到实际工程设计中。
哥很郁闷,为了 CAN 研究了不少,看了不少资料,现在我给大家总结一下
先看看工作原理
当 CAN 总线上的一个节点(站)发送数据时,它以报文的形式广播给网络中所
有节点,对每个节点来说,无论数据是否是发给自己的,都对其接收。每组报
文开头的 11 位字符为标识符,定义了报文的优先级,这种报文格式成为面向内
容的编制方案。同一系统中标识符是唯一的,不可能有两个站发送具有相同标
识符的报文,当几个站同时竞争总线读取时,这种配置十分重要。
大体的工作原理我们搞清了,但是根本的协议我们还要花一番功夫。下面介
绍一个重要的名词,“显性“和”隐性“
在我看到的很多文章里,有很多显性和隐性的地方,为此我头痛不已,最终
我把它们彻底弄明白了。
首先 CAN 数据总线有两条导线,一条是黄色的,一条是绿色的。分别是
CAN_High 线和 CAN_Low 线
当静止状态时,这两条导线上的电平一样。这个电平称为静电平。大约为 2.5 伏。
这个静电平状态就是隐形状态,也称隐性电平。也就是没有任何干扰的时候的状
态称为隐性状态.当有信号修改时,CAN_High 线上的电压值变高了,一般来说
会升高至少 1V,而 CAN_Low 线上的电压值会降低一个同样值,也是 1v,那么
这时候。CAN_High 就 是 2.5v+1v=3.5v,它就处于激活状态了。而 CAN_Low 降
为 2.5v-1v=1.5v。
可以看看这个图
由此我们得到
在隐性状态下,CAN_High 线与 CAN_Low 没有电压差,这样我们看到没有任
何变化也就检测不到信号。但是在显性状态时,电压差最低为 2V,我们就可以
利用这种变化才传输数据了。所以出现了那些帧,那些帧中的场,那些场中的
位,云云~~~~~~~~~~~
在总线上通常逻辑 1 表示隐性。而 0 表示显性。这些 1 啊,0 啊,就可以利用起
来为我们传数据了。
利用这种电压差,我们可以接收信号。
一般来说,控制单元通过收发器连接到 CAN 驱动总线上,这个收发器(顾名思
义,可发送,可接收)内有一个接收器,该接收器是安装在接收一侧的差动信号
放大器。然后,这个放大器很自然地就放大了 CAN_High 和 CAN_Low 线的电平
下载后可阅读完整内容,剩余5页未读,立即下载
560 浏览量
2012-12-25 上传
280 浏览量
2021-10-15 上传
点击了解资源详情
187 浏览量

次第花开_
- 粉丝: 2
- 资源: 16
 我的内容管理
展开
我的内容管理
展开







最新资源
- (相位差检测)AD8302模块资料.rar
- The-Real-Scoop:HCI,移动应用程序项目
- Shopping-application
- Tic-Tac-Toe
- en_visual_studio_2010_ultimate
- Personal-Portfolio-Website-With-GSAP
- 乐得同城优惠券系统 v1.9.0
- 风越网页隐藏资源下载器 v3.84
- 测试驱动的应用
- meta-generative-art_dcgan
- EMSApplicationOTPBased
- 凡诺企业网站管理系统 v10.3
- PyProjManWeb:这次基于Django构建的Web版本的PyProjMan
- clean-architecture-node-api:API completa com Typescript utilizando TDD,Clean Architecture,设计模式和SOLID
- 行业文档-设计装置-一种平整的环保型瓦楞纸板.zip
- ticketing:研究项目
