CAN总线接口电路详解与设计要点
需积分: 12 126 浏览量
更新于2024-07-26
收藏 496KB PDF 举报
CAN总线接口电路是一种专用于实时和分布式控制的串行通信网络,最初由德国Bosch公司在1980年代开发,主要用于汽车内部的测试和控制仪器间的通信。CAN全称为Controller Area Network,其电气参数和信号表示遵循特定的标准,ISO11898便是这一国际标准的体现,得到了多家知名半导体厂商的支持,如Motorola、Intel和Philips。
CAN总线具有以下主要技术特点:
1. 点对点通信:每个节点可以独立发送和接收数据,无需中央控制器。
2. 高速传输:最高数据速率可达1Mbps,适合实时控制应用。
3. 较低的成本:由于使用了简单的硬件设计和较少的电缆,使得CAN在成本上具有优势。
4. 简单易用:CAN采用错误检测和自我恢复机制,提高了通信可靠性。
在电路设计方面,本文详细阐述了一种采用Philips公司生产的SJA1000控制器和82C250收发器的CAN总线接口。SJA1000是一个高度集成的通信控制器,它拥有内置的CAN控制器和收发器功能,简化了系统设计。82C250是一款专用的CAN收发器,它处理物理层的信号转换,确保数据能在CAN总线上正确传输。
设计过程包括以下几个关键部分:
- 单片机最小系统:作为系统的中央处理器,负责数据处理和控制任务。
- CAN总线接口控制电路:这部分设计着重于SJA1000的配置,包括初始化、数据帧的构建与解析。
- CAN总线收发电路:通过82C250实现CAN信号的发送和接收,确保可靠的数据交换。
- 复位和监控电路:X5045P可能是用于系统重启和状态监控的辅助芯片。
- 电源设计:确保电路稳定运行所需的电压和电流供应。
- 总体电路原理图:展示了所有组件如何协同工作,形成一个完整的CAN总线接口系统。
在应用中,设计者需要注意的问题可能涉及硬件兼容性、错误检测和处理策略,以及与其他系统的集成。CAN总线在汽车自动化(如发动机控制、刹车系统)和工业过程控制中表现出色,但由于其实时性和可靠性,也被广泛应用于其他对数据传输速度和精确性有高要求的领域。
本文提供了一个全面且深入的CAN总线接口电路设计指南,对CAN协议的理解、硬件选择和实际电路设计步骤进行了详尽的讲解,有助于工程师在实际项目中高效地应用CAN技术。
1Mbps(此时通信距离最长为 40m)。
CAN 上的节点数主要决定于总线驱动电路,目前可达 110 个;报文标识符可达 2032
种(CAN2.0A),而扩展标准(CAN2.0B)的报文标识符几乎不受限制。
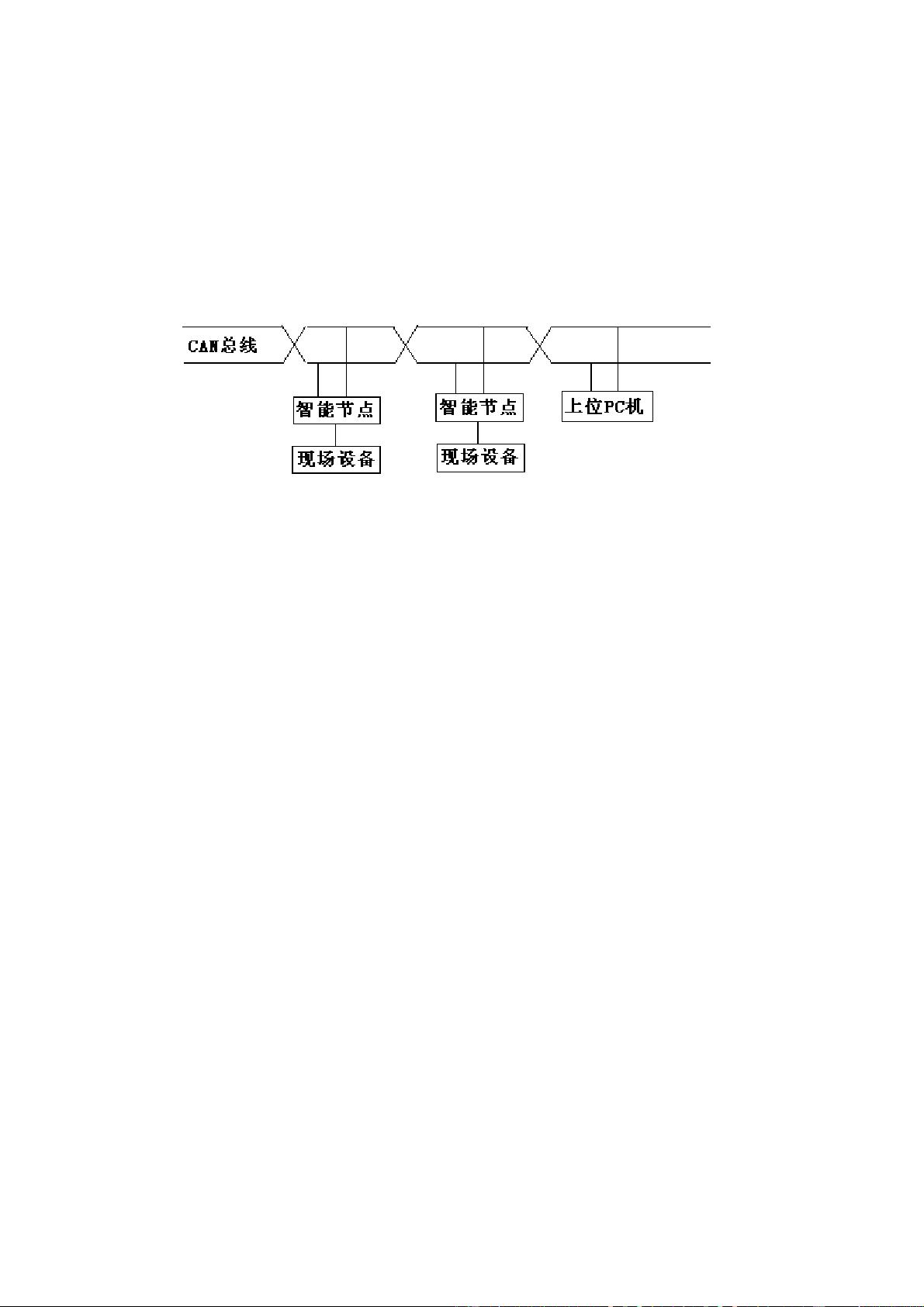
1.3 CAN 总线通信系统拓扑结构
CAN 在物理结构上属于总线式通信网络。系统的组成如下图:
图 1 CAN 总线系统结构图
该系统由上位监控 PC 机、智能节点和现场设备三部分组成。上位监控 PC 机主要
负责对系统数据的接受与管理、控制命令的发送以及各控制单元动态参数和设备状态
的实时显示;智能节点可以使现场设备方便地连接到 CAN 总线上,主要负责对现场的
环境参数和设备状态进行监测,对采集来的数据进行打包处理并将处理古的数字信号
通过 CAN 通信控制器 SJA1000 发送到 CAN 总线。智能节点的设计和选择,对通信信号
的传输发送有很的影响,系统中的数据传送和接收,都是通过 CAN 总线接口实现。CAN
总线接口电路的设计,对 CAN 总线很是重要。本文正是基于此,对 CAN 总线接口电路
进行设计分析,给出一种设计方案。
2 CAN总线接口电路设计
2.1 总体方案设计
CAN 总线接口电路主要包括:单片机、控制器接口、总线收发器和看门狗电路等。
采用 Philips 公司生产的 SJA1000 控制器和与其配套的 82C250CAN 收发器。按照 CAN
总线物理层协议选择总线介质,设计布线方案,连接成 CAN 网络。双绞屏蔽线可设两
套,在两套介质上同时进行信息传输,接收方只用一个介质。在冗余和非冗余段的连
接临界点处进行总线切换。
硬件电路的设计主要是 CAN 通信控制器与微处理器之间和CAN总线收发器与物理
总线之间的接口电路的设计。CAN 通信控制器是 CAN 总线接口电路的核心,主要完成
CAN 的通信协议,而 CAN 总线收发器的主要功能是增大通信距离,提高系统的瞬间抗
干扰能力,保护总线,降低射频干扰(RFI),实现热防护等。看门狗电路主要是实现
对电路的监控和复位作用。
3
本页已使用福昕阅读器进行编辑。
福昕软件(C)2005-2010,版权所有,
仅供试用。
剩余24页未读,继续阅读
2011-04-10 上传
2008-12-04 上传
2014-04-24 上传
2020-08-09 上传
117 浏览量
2019-06-21 上传
2020-08-20 上传

u010093947
- 粉丝: 0
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 前端协作项目:发布猜图游戏功能与待修复事项
- Spring框架REST服务开发实践指南
- ALU课设实现基础与高级运算功能
- 深入了解STK:C++音频信号处理综合工具套件
- 华中科技大学电信学院软件无线电实验资料汇总
- CGSN数据解析与集成验证工具集:Python和Shell脚本
- Java实现的远程视频会议系统开发教程
- Change-OEM: 用Java修改Windows OEM信息与Logo
- cmnd:文本到远程API的桥接平台开发
- 解决BIOS刷写错误28:PRR.exe的应用与效果
- 深度学习对抗攻击库:adversarial_robustness_toolbox 1.10.0
- Win7系统CP2102驱动下载与安装指南
- 深入理解Java中的函数式编程技巧
- GY-906 MLX90614ESF传感器模块温度采集应用资料
- Adversarial Robustness Toolbox 1.15.1 工具包安装教程
- GNU Radio的供应商中立SDR开发包:gr-sdr介绍
