"基于SLAM技术的移动机器人室内环境下可穿越性研究"
需积分: 0 115 浏览量
更新于2024-01-14
收藏 17.63MB PDF 举报
这篇论文研究了基于SLAM技术的移动机器人在室内环境下的可穿越性。论文的主要研究对象是孙相宇,指导教师是叶秀芬教授,研究生专业是控制科学与工程。
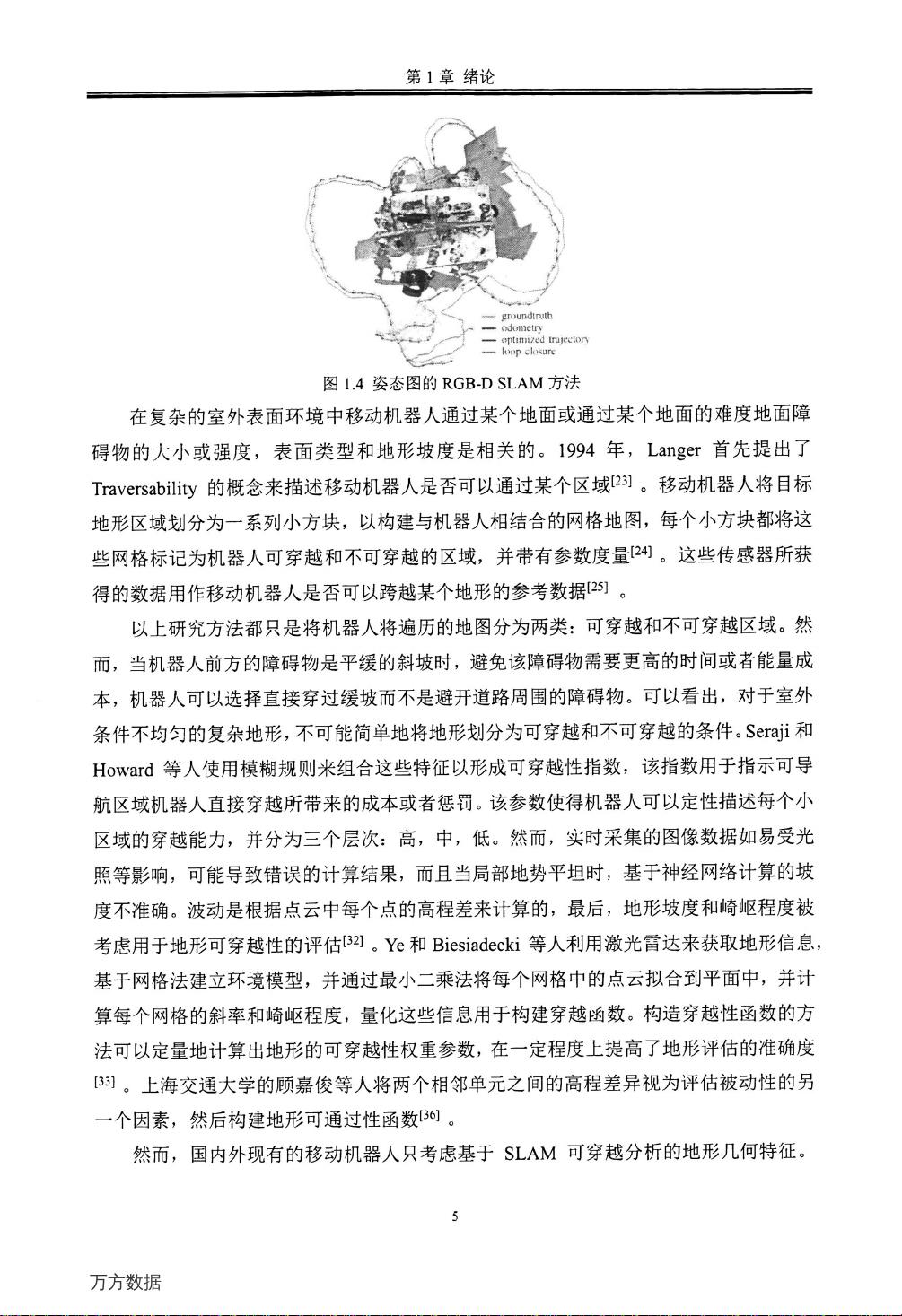
论文从室内环境的角度出发,通过SLAM技术实现移动机器人的定位与建图。SLAM技术是指同时进行机器人定位与地图构建的一种技术。通过激光雷达等传感器,机器人能够感知周围环境的信息,并将其用于定位和建图。在室内环境中,由于存在复杂的障碍物和未知的地形,机器人的可穿越性是一个关键问题。
论文首先对SLAM技术进行了详细的介绍,包括其原理和常用的算法。然后,论文提出了一种基于SLAM技术的移动机器人室内环境下的可穿越性研究方法。该方法首先通过激光雷达获取环境的三维点云数据,并结合机器人的运动信息对其进行建图。然后,通过对建图数据进行分析和处理,得出机器人在室内环境中的可穿越路径。
为了验证论文所提出的方法的有效性,作者进行了一系列实验。在实验中,作者使用了一台移动机器人和激光雷达,并在不同的室内环境中进行了测试。通过对实验数据的分析和比较,作者得出了一些结论。首先,基于SLAM技术的移动机器人能够较为准确地定位和建图。其次,机器人在室内环境中存在一定的可穿越路线,通过优化算法和路径规划,可以实现机器人的穿越任务。
最后,论文总结了研究结果,并提出了进一步的研究方向。作者认为,基于SLAM技术的移动机器人在室内环境下的可穿越性研究还存在一些挑战和难点,例如如何处理复杂的环境信息和实时更新地图等。因此,未来的研究可以进一步深入研究这些问题,并提出更加优化的算法和方法。
总之,本论文通过对基于SLAM技术的移动机器人在室内环境下可穿越性的研究,为室内机器人导航和路径规划提供了一定的参考。论文通过实验证明了基于SLAM技术在室内环境中定位和建图的有效性,并提出了一种新的可穿越性研究方法。通过此论文的研究,可以为室内环境下移动机器人的应用和发展提供一定的参考和指导。
万方数据

剩余82页未读,继续阅读
378 浏览量
139 浏览量
2022-08-03 上传
2021-08-14 上传
2021-09-19 上传
5966 浏览量
点击了解资源详情
256 浏览量
点击了解资源详情

郭逗
- 粉丝: 33
 我的内容管理
展开
我的内容管理
展开







最新资源
- 武汉大学数字图像处理课程课件精要
- 搭建个性化知识付费平台——Laravel开发MeEdu教程
- SSD7练习7完整解答指南
- Android中文API合集第三版:开发者必备指南
- Python测试自动化实践:深入理解更多测试案例
- 中国风室内装饰网站模板设计发布
- Android情景模式中音量定时控制与铃声设置技巧
- 温度城市的TypeScript实践应用
- 新版高通QPST刷机工具下载支持高通CPU
- C++实现24点问题求解的源代码
- 核电厂水处理系统的自动化控制解决方案
- 自定义进度条组件AMProgressView用于统计与下载进度展示
- 中国古典红木家具网页模板免费下载
- CSS定位技术之Position-master解析
- 复选框状态持久化及其日期同步技术
- Winform版HTML编辑器:强大功能与广泛适用性
