多相机SLAM系统:实时模块化MULTICOL-SLAM研究
需积分: 32 87 浏览量
更新于2024-07-14
收藏 1.94MB PDF 举报
"MULTICOL-SLAM 是一个模块化实时多相机SLAM系统,由S.Urban和S.Hinz在Karlsruhe Institute of Technology的摄影测量与遥感研究所开发。该系统支持鱼眼相机,并包含束调整、ego-motion估计和闭环检测等功能,适用于机器人、自动驾驶汽车以及潜在的增强现实和虚拟现实应用。"
正文:
SLAM(Simultaneous Localization and Mapping,同时定位与建图)是计算机视觉和机器人领域中的关键技术,它允许设备在未知环境中实时构建地图并估计自身位置。近年来,许多开源SLAM系统已被提出和发布,极大地推动了这一领域的进步。
MULTICOL-SLAM是一个针对多相机系统的先进SLAM框架。它不仅扩展了现有的SLAM技术,还引入了MultiCol模型,使系统能够处理任意数量、刚性连接的多相机系统。这种模块化设计使得系统具有高度的灵活性和可扩展性,可以适应各种复杂和变化的环境。
在多相机设置中,每个相机可以提供不同的视图,从而增加场景覆盖范围,提高定位和建图的准确性。使用鱼眼相机是另一个显著特点,鱼眼镜头能捕获更大的视场角,这对于狭窄空间或需要广角视野的应用尤其有益。然而,鱼眼镜头产生的图像畸变需要特殊处理,MULTICOL-SLAM通过束调整算法来校正这些畸变,确保地图的精确性。
ego-motion估计是SLAM中的核心部分,它涉及到对相机运动的实时追踪。在MULTICOL-SLAM中,通过分析不同相机间的同步图像数据,系统可以计算出相机相对于环境的运动,从而更新地图和位姿估计。
闭环检测是防止SLAM系统漂移的关键组件。当系统识别到已访问过的区域时,可以通过闭环回路关闭来修正长期定位误差。MULTICOL-SLAM实现了这一功能,提高了长期定位的稳定性。
为了验证系统性能,论文进行了基于准确地面实况的性能评估,并将多相机版本的SLAM与单相机版本进行对比。开源实现使得其他研究者和开发者能够轻松地访问、测试和改进这个系统,促进了SLAM技术的进一步发展和应用。
MULTICOL-SLAM是多相机SLAM领域的一个重要贡献,它提供了强大的工具来应对复杂环境中的定位和建图挑战,尤其是在自动驾驶、机器人探索和增强现实等领域有着广泛的应用前景。
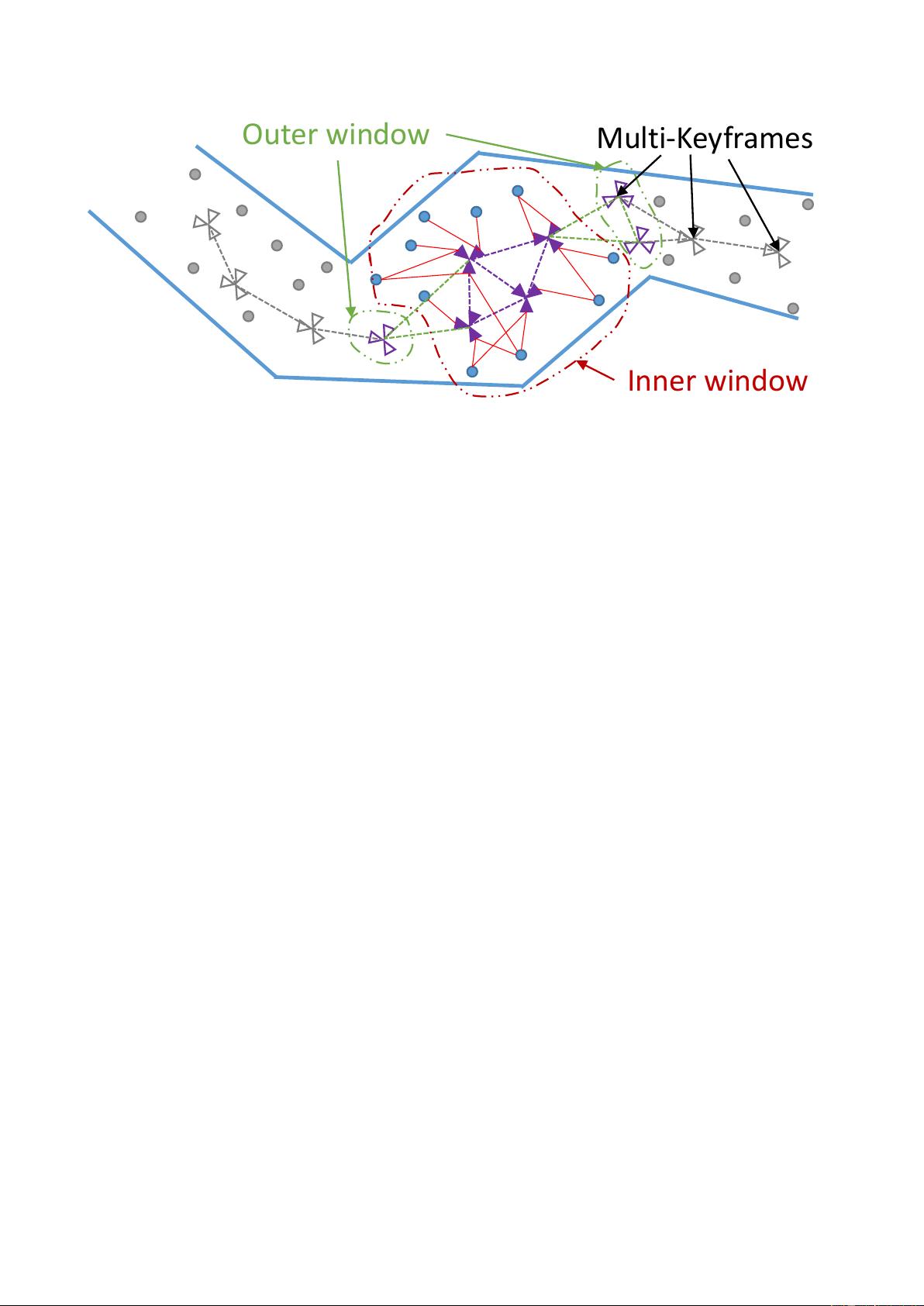
Inner window
Outer window
Multi-Keyframes
Figure 2. Principle of double window SLAM.
map quality. We will build our multi-fisheye camera SLAM upon
ORB-SLAM and explain all changes in the next sections.
The methods described so far either use a single camera (Monoc-
ular SLAM) or a stereo configuration (Stereo SLAM). CoSLAM
(Collaborative SLAM) (Zou and Tan, 2013) aims at combining
the maps build by multiple cameras moving around in dynamic
environments independently. The authors introduce inter-camera
tracking and mapping and methods to distinguish static back-
ground points and dynamically moving foreground objects. In
(Heng et al., 2014), four cameras are rigidly coupled on a MAV.
Two cameras are paired in a stereo configuration respectively and
self-calibrated to an IMU on-line. The mapping pipeline is simi-
lar to ORB-SLAM and also uses ORB descriptors for map point
assignment. Additionally, the authors propose a novel 3-Point
algorithm to estimate the relative motion of the MAV including
IMU measurements. Most recent work on multi-camera SLAM is
dubbed MC-PTAM (Multi-Camera PTAM) (Harmat et al., 2012,
Harmat et al., 2015) and is build upon PTAM. In a first step (Har-
mat et al., 2012), the authors changed the perspective camera
model to the generic polynomial model that is also used in this
paper. This induces further changes, e.g. relating the epipolar
correspondence search that now has to be performed on great cir-
cles on the unit sphere instead of point to line distances in the
plane. In addition, significant changes concerning the tracking
and mapping pipeline had to be made to include multiple rigidly
coupled cameras. Keyframes are extended to MKFs as they now
hold more than one camera. As PTAM, their system uses patches
as image features and warps them prior to matching. Still, the
system lacks a mapping pipeline that is capable to perform in
large-scale environments. Subsequent work (Harmat et al., 2015)
improved upon (Harmat et al., 2012) and is partly similar to the
SLAM system developed in this thesis in that it uses the same
camera model and g2o to perform graph optimization. On top,
the authors integrated an automated calibration pipeline to esti-
mate the relative orientation of each camera in the MCS. Still the
system uses the relatively simple mapping back-end of PTAM in-
stead of double-window optimization that is used in this thesis
and has proven to be superior. In addition, image patches are
used as features making place recognition, loop closing and the
exploration and storage of large environments critical.
Thus far, all approaches were based on local point image features.
Hence, the reconstructed environment will stay relatively sparse
even if hundreds of features are extracted in each keyframe. This
makes it difficult for autonomous vehicles or robots that explore
their surrounding to automatically analyze and extract object struc-
ture or texture information. Thus, most of the time, camera local-
ization is coupled with laser scanners (Lin et al., 2012), struc-
tured light (Kerl et al., 2013), yielding structured object informa-
tion. Recent work on semi-dense (Forster et al., 2014, Engel et
al., 2014) and dense (Newcombe et al., 2011, Concha and Civera,
2015) camera-based SLAM systems make use of a single camera
to estimate dense scene structure instead of reconstructing only
point features.
LSD-SLAM (Engel et al., 2014) is a semi-dense approach that
runs on a single CPU in real-time, in contrast to dense methods
(Newcombe et al., 2011) that need heavy GPU support. Using
direct image-alignment by minimizing the photometric error be-
tween image discontinuities, the method skips the costly feature
extraction and matching stage of all feature-based SLAM sys-
tems. The time saved compensates for the increased BA run-
time, as a huge number of observations is included. In addition,
all scale-drift aware loop closing and large scale double window
optimizations are included, making LSD-SLAM a state-of-the-
art approach that also runs in real-time. However, loop closing
uses FAB-MAP (Cummins and Newman, 2010) for place recog-
nition and thus requires SURF features to be extracted. Subse-
quent work extended the method to mobile phones (Sch
¨
ops et
al., 2014), stereo (Engel et al., 2015) as well as omnidirectional
cameras (Caruso et al., 2015). Instead of coupling camera pose
estimation and semi-dense mapping, in (Mur-Artal and Tard
´
os,
2015) a semi-dense extension to ORB-SLAM is presented. The
semi-dense map is reconstructed from feature-based keyframes
using depth consistency tests and a novel correspondence search.
The semi-dense reconstruction is not obtained in real-time but is
calculated in a CPU thread running in parallel to tracking and
mapping. The methods yields superior performance compared to
LSD-SLAM and it seems that the decoupling is advantageous,
especially in dynamic scenes.
3. CONTRIBUTIONS
We will extend the state-of-the-art ORB-SLAM to multi-fisheye
camera systems using MultiCol (Urban et al., 2016b). Our contri-
butions to ORB-SLAM (and ORB-SLAM2 respectively) are the
following:
1. The introduction of Multi-Keyframes (MKFs).
剩余14页未读,继续阅读
409 浏览量
230 浏览量
556 浏览量
556 浏览量
166 浏览量
2022-09-14 上传
102 浏览量
2022-09-21 上传

donghanruchen
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- Ruby语言集成Mandrill API的gem开发
- 开源嵌入式qt软键盘SYSZUXpinyin可移植源代码
- Kinect2.0实现高清面部特征精确对齐技术
- React与GitHub Jobs API整合的就业搜索应用
- MATLAB傅里叶变换函数应用实例分析
- 探索鼠标悬停特效的实现与应用
- 工行捷德U盾64位驱动程序安装指南
- Apache与Tomcat整合集群配置教程
- 成为JavaScript英雄:掌握be-the-hero-master技巧
- 深入实践Java编程珠玑:第13章源代码解析
- Proficy Maintenance Gateway软件:实时维护策略助力业务变革
- HTML5图片上传与编辑控件的实现
- RTDS环境下电网STATCOM模型的应用与分析
- 掌握Matlab下偏微分方程的有限元方法解析
- Aop原理与示例程序解读
- projete大语言项目登陆页面设计与实现
