"工业机器人轨迹规划与控制方法综述"
版权申诉
187 浏览量
更新于2024-03-09
收藏 753KB DOC 举报
工业机器人的轨迹规划和控制在现代制造业中扮演着至关重要的角色。工业机器人操作臂被广泛应用于各种领域,目的是实现快速、精确和高质量的生产。在不同的操作中,比如抓取、放置、部分操作、聚合等,操作臂的末端执行器必须能够在工作空间中移动到指定位置,而在两个位置之间的路径并不是最重要的。然而,在一些需要路径追踪的应用中,比如焊接、切割、喷涂等,末端操作器必须按照特定的轨迹在三维空间中移动。在这些情况下,轨迹规划变得更加复杂,因为需要考虑到速度、加速度、轨迹误差等多个限制条件。
如果在轨迹规划过程中没有充分考虑这些限制条件,往往会导致机器人执行效果不佳,比如轨迹超调、偏离给定轨迹、速度波动过大等问题。特别是在笛卡尔轨迹中的急弯处,机器人的表现可能会更加恶化。为了解决这些问题,许多轨迹规划算法已经被提出,涵盖了从笛卡尔轨迹规划到时间最优轨迹规划的各种方法。然而,大多数这些方法并不适用于工业系统,主要有两个原因:一是这些技术通常需要对机器人硬件进行重新配置和移动,在生产过程中需要停机进行系统改造,这会导致生产效率下降;二是这些方法大多只考虑了一种约束条件,而忽略了工业机器人实际运用中的多样性和复杂性。
因此,如何在考虑多种约束条件的情况下进行有效的工业机器人轨迹规划和控制成为当前研究的热点问题。现有的方法中,一种常见的做法是将工业机器人运动规划问题转化为一个优化问题,通过求解优化算法来得到最优轨迹。同时,利用逆向动力学模型和路径规划算法来生成平滑且满足限制条件的轨迹也是一种有效的方法。此外,采用基于模型预测控制(MPC)的方法,将轨迹规划和控制集成在一个框架中,可以更好地处理系统的动态响应和约束条件。
在未来,随着人工智能、机器学习等技术的不断发展,工业机器人的轨迹规划和控制将迎来新的机遇和挑战。通过引入更先进的算法和方法,结合实时传感器和反馈控制系统,可以实现更加智能化、自适应的工业机器人运动规划和控制。这将有助于提高生产效率、降低成本,并推动工业制造业向着智能化、数字化的方向发展。
综上所述,工业机器人的轨迹规划和控制是现代制造业中至关重要的一环,通过合理的轨迹规划和控制算法,可以实现机器人在各种复杂环境下的高效运动。随着技术的不断进步,我们相信工业机器人的轨迹规划和控制将会迎来更加美好的未来。
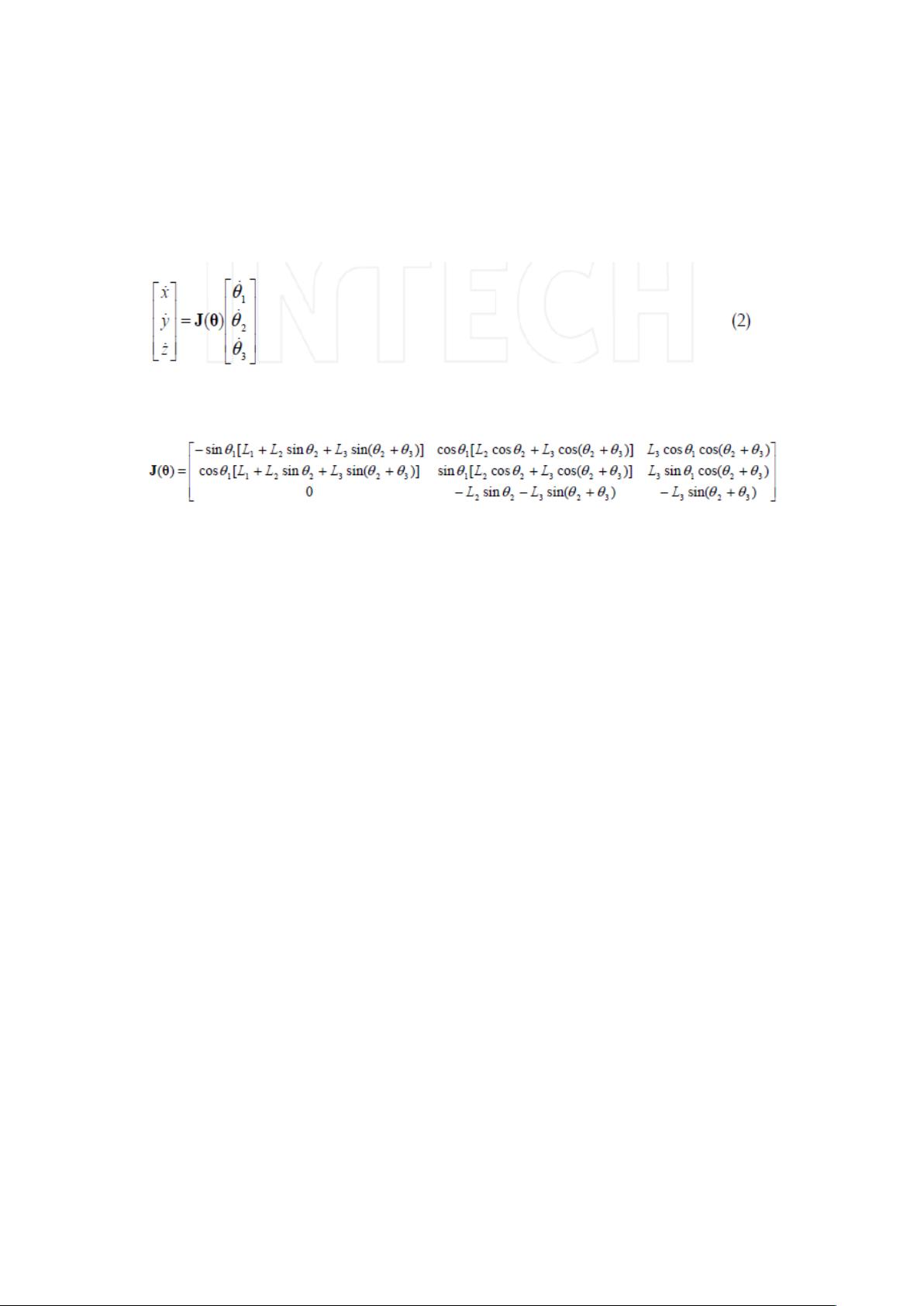
(x,y,z)是末端操作器的位置坐标,
1
�
,
2
�
,
3
�
是相应的节点
结构位置。
j
L
是连杆长度。通过对(1)式微分可以得到笛卡
尔速度和节点速度之间的关系如下:
雅克比矩阵为:
其中
�
= [
1
�
,
2
�
,
3
�
]
T
是操作臂的位置。
2.2 工业机器人操作臂节点动力学
工业机器人操作臂被设计来满足需求,比如焊接,切削,部
分操纵等。特定的规格一般被限制在确定的准确性,速度和
复杂性上。因此,大多数工业机器人操作臂经常被设计加入
带有限流电源放大器的 PID 控制器。电流的限度决定了节点
加速的限制。此外,不管未知的惯性力矩,科里奥利力矩,
离心力矩,节点是被独立控制的,摩擦力矩和重力矩被视作
控制器的干扰。为了支持这个假设,操作臂连杆被设计为低
惯性,节点被尽可能少的传动装置驱动。这些控制器很简单,
也提供很有效的鲁棒性。图 2 举例说明了一个工业机器人操
作臂的三自由度解耦节点动力学模型。
剩余15页未读,继续阅读
2023-03-01 上传
2021-11-26 上传
2021-10-06 上传
2021-10-29 上传
2021-11-16 上传
2023-07-12 上传

omyligaga
- 粉丝: 97
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- turtle-logo:用于Turtle徽标编程语言的MakeCode扩展
- screepsmod-mongo:用MongoDB和Redis替换LokiJS
- Personal-Website:我的个人作品集展示了我的经验和项目
- elirehema:自述文件
- EightInSeven:Minecraft 1.8 1.7.10 的可见性行走算法
- illustrator-scripts-for-mobile:Illustrator脚本的集合,这些脚本可将图层或画板导出到不同密度的PNG(iOS Retina Display,Android设备等)
- Andron
- 安卓电视机大屏显示ui设计
- Assertions:作证断言集
- 正常运行时间:st stitcombe的正常运行时间监控器和状态页面,由@upptime提供支持
- mern:Mern edu应用
- 行业文档-设计装置-一种降低混合机物料残留的方法.zip
- nvim:这是我的nvim点文件。 它已经被配置为在您的系统中自动安装vim-plug
- 疯狂java讲义源码下载-The-Way-I-Learn-Android:我的Android学习之路,主要记录我的android的学习过程,时
- html_rocketseat
- Python库 | FuXi-1.0_rc.dev-py2.5.egg
