Simulink快速原型驱动工具箱:设计、实现与优势
需积分: 9 28 浏览量
更新于2024-07-09
收藏 2.18MB PDF 举报
"MPC5644A 快速原型 Simulink驱动工具箱 设计 实现"
在本文中,我们将深入探讨“Simulink快速原型驱动工具箱”的设计与实现,该工具箱专为MPC5644A微控制器(MCU)设计,旨在简化基于Simulink的控制系统开发过程。驱动工具箱的主要目标是提供一个无缝集成的环境,允许用户通过Simulink模块库构建系统仿真模型,并自动产生硬件驱动程序,无需手动编写代码。
驱动工具箱的作用在于,它能够与Simulink的标准模块协同工作,利用Real-Time Workshop (RTW)代码生成工具自动生成针对MPC5644A的驱动程序。这不仅节省了开发者的时间,也降低了因人为编写代码可能引入的错误。用户只需专注于Simulink模型的搭建,而无需关注底层的驱动程序和控制算法实现。这种方法提高了开发效率,确保了控制程序的质量,不论开发者的编程技能如何。
工具箱包含一系列针对MPC5644A的驱动模块,如:实时接口(RTI)模块、锁相环(PLL)模块、数字输入/输出(DIO)模块、通用目的定时器(GPT)模块、增强型多接口操作系统(eMIOS)模块、模拟-to-数字转换器(ADC)模块、CAN总线模块、串行通信接口(SCI/LIN)模块、SPI模块以及看门狗定时器(WDG)模块。每个驱动模块都需要独立开发,遵循特定的流程:
1. **编写驱动程序**:首先,根据MPC5644A的硬件特性,编写驱动程序的源代码,实现与硬件设备的交互功能。
2. **封装驱动程序**:将编写的驱动程序封装成函数库,以便于在Simulink环境中调用。
3. **编写设备驱动模块**:利用Simulink的S-Function机制,创建设备驱动模块,这个模块将作为Simulink模型中的元素。
4. **封装设备驱动模块**:将驱动程序与Simulink模型集成,创建用户友好的接口,方便在模型中使用。
5. **内嵌驱动模块程序**:通过RTW代码生成工具,将驱动模块嵌入到最终的模型源代码中,生成可直接运行在MPC5644A上的控制程序。
这种设计方法的一个关键优势在于,它允许用户通过图形化的方式进行系统建模,降低了对底层硬件知识的要求。模型的正确性在Simulink环境中就能得到验证,生成的代码可靠性高,且与硬件紧密耦合,提升了控制系统的性能。
总结来说,"Simulink快速原型驱动工具箱设计与实现"是一个高效且用户友好的解决方案,特别适用于基于MPC5644A的控制系统开发。通过该工具箱,开发人员可以更专注于系统的功能设计和优化,而非繁琐的驱动程序编写,从而提高整体项目的开发效率和质量。
云之巅工作室
http://shop108493800.taobao.com MPC5644A 驱动工具箱的设计与实现
云之巅工作室
http://shop108493800.taobao.com 第 10 页(共 54 页)
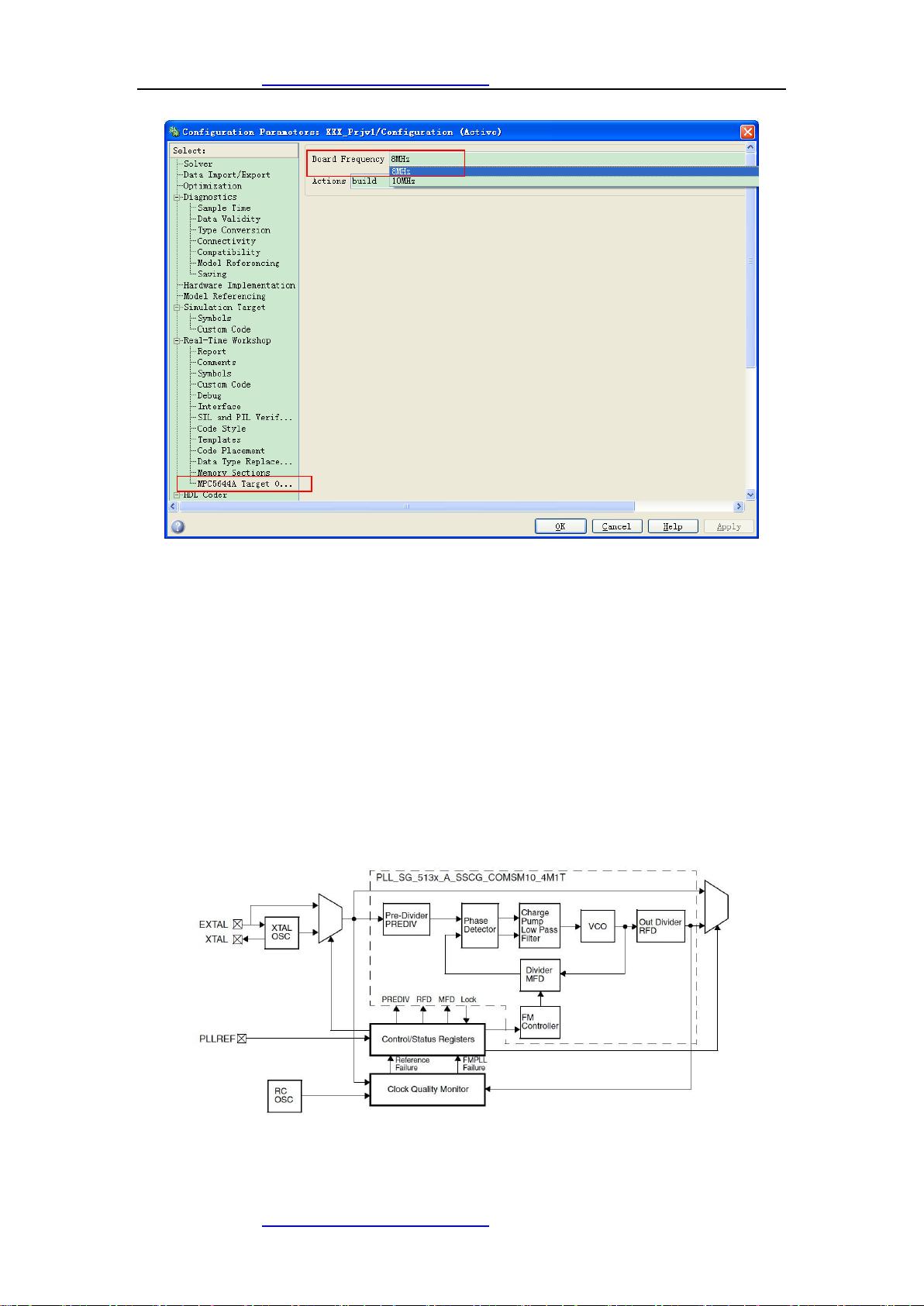
图 7 选择晶振频率
2、RTI中断函数只执行中断次数的自加操作,然后在main函数中通过判断RTI
的中断次数来选择是否执行step函数,尽量实现中断函数最小化。
3.2 PLL 模块
MPC5644A锁相环模块用于根据外部时钟或晶振频率而产生高速系统频率。
一般来说系统频率越高,执行一条指令所需的时间越短。因此,为了提高程序的
运行效率,需要配置锁相环来提高系统频率。
锁相环模块框图,如图8所示:
图 8 锁相环模块框图
从锁相环的模型框图中可知,系统频率与晶振和合成器控制寄存器SYNCR
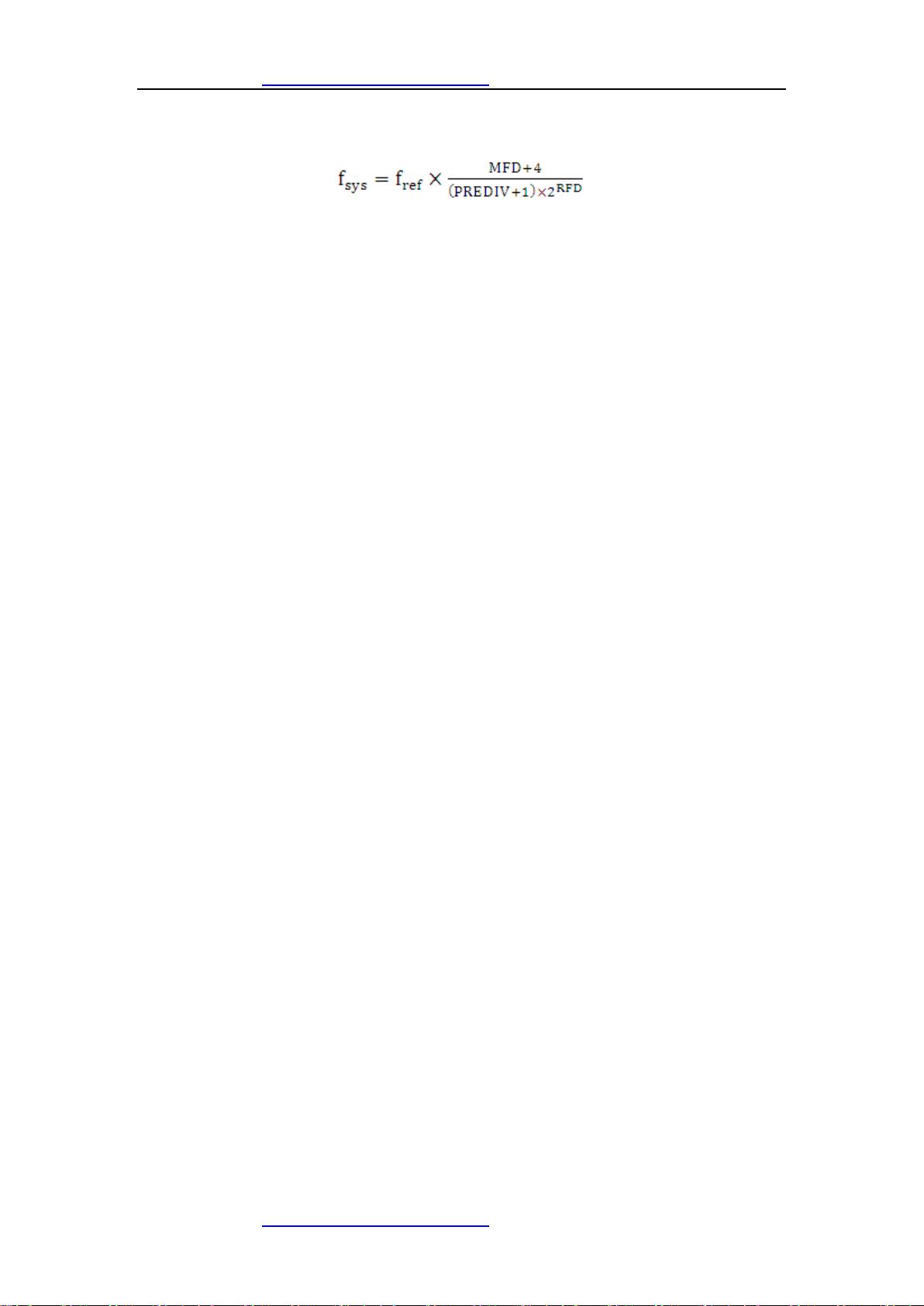
剩余53页未读,继续阅读
2019-08-13 上传
2021-08-11 上传
2018-08-14 上传
2023-08-15 上传
2023-06-07 上传
2024-01-27 上传
2023-06-06 上传
2023-05-16 上传
2023-05-27 上传

langyidao2008
- 粉丝: 4
- 资源: 16
 我的内容管理
展开
我的内容管理
展开







最新资源
- WPF渲染层字符绘制原理探究及源代码解析
- 海康精简版监控软件:iVMS4200Lite版发布
- 自动化脚本在lspci-TV的应用介绍
- Chrome 81版本稳定版及匹配的chromedriver下载
- 深入解析Python推荐引擎与自然语言处理
- MATLAB数学建模算法程序包及案例数据
- Springboot人力资源管理系统:设计与功能
- STM32F4系列微控制器开发全面参考指南
- Python实现人脸识别的机器学习流程
- 基于STM32F103C8T6的HLW8032电量采集与解析方案
- Node.js高效MySQL驱动程序:mysqljs/mysql特性和配置
- 基于Python和大数据技术的电影推荐系统设计与实现
- 为ripro主题添加Live2D看板娘的后端资源教程
- 2022版PowerToys Everything插件升级,稳定运行无报错
- Map简易斗地主游戏实现方法介绍
- SJTU ICS Lab6 实验报告解析
