机器人动力学深入解析:从运动学到动力学方程
需积分: 31 73 浏览量
更新于2024-07-22
1
收藏 647KB PPT 举报
"机器人动力学是研究机器人运动特性与力之间关系的学科,涉及机器人运动方程的表示、求解及其实例分析,如PUMA560机器人的示例。动力学分为正问题和逆问题,前者由力求运动,后者由运动求力。课程涵盖刚体动力学、Lagrange方法建立机械手动力学方程,并通过实例如二杆、三杆机械手进行解析。此外,还讨论了机器人的动态特性和稳态负荷问题。"
机器人动力学深入探讨了机器人系统中力与运动之间的相互作用。在运动学部分,主要研究如何描述和计算机器人的运动,包括利用变换矩阵表示机械手的位置和姿态,例如欧拉角、横滚、俯仰和偏转角等表示方法。运动方程的求解通常涉及欧拉变换、滚-仰-偏变换和球面变换。例如,PUMA560机器人的运动方程解析展示了如何结合实际连杆参数求解关节位置。
动力学方面,重点关注两个核心问题:动力学正问题和逆问题。动力学正问题要求已知各个关节的力或力矩,计算出关节的位移、速度、加速度以及运动轨迹。反之,动力学逆问题则是已知运动轨迹,反推出关节驱动力和力矩。这在机器人控制和路径规划中至关重要。
在刚体动力学部分,课程回顾了经典力学中的概念,如绝对运动、相对运动和牵连运动,并建立了绝对运动方程。Lagrange方法用于构建机械手的动力学方程,这是一种能量法,能够考虑系统的动能和势能,从而推导出力矩方程。通过具体的机械手实例,如二杆机械手和三杆机械手,学生可以更好地理解动力学方程的构建和求解过程。
此外,机器人动力学还关注机器人的动态特性,这涉及到机器人的惯性特性、阻尼和弹性等,这些因素影响着机器人的运动响应和稳定性。稳态负荷分析则研究在长期操作条件下,机器人承受的恒定或周期性负载对其性能的影响,这对于设计耐用和高效的机器人系统极其重要。
"机器人动力学"不仅涵盖了机器人运动学的基本理论,还深入到动力学问题的解决策略,通过实例强化理论学习,为机器人控制和系统设计提供了坚实的理论基础。
10
Robotics 动力学
5.1 机器人刚体动力学
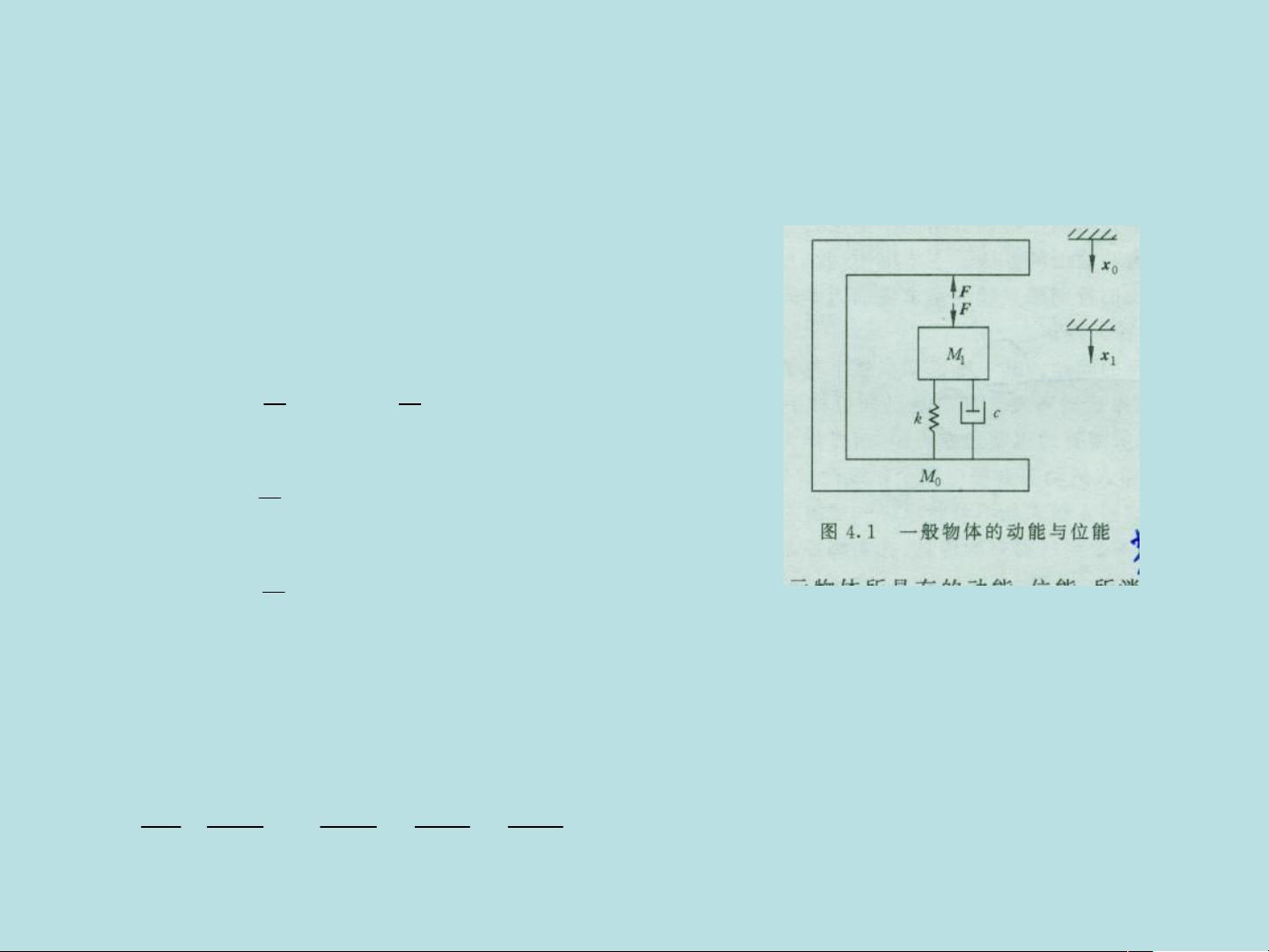
5.1.0 动力学基本定理
3 。耗散函数
4 。拉格朗日函数
2
122
2
11
)(
2
1
xxx
2
22212
2
121
2
22
2
11
2
2
1
)(
2
1
xcxxcxccxmxm
VTL
剩余58页未读,继续阅读
494 浏览量
1772 浏览量
741 浏览量

qq_28470985
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- 解决TC2.0笔试题BUG与微软面试迷语解析
- 十分钟快速入门ModelSimSE:Verilog测试与分频示例
- 46家著名IT公司笔试题目集锦
- MATLAB实现数字信号处理基础教程与示例
- 优化无线网络的自适应TCP/IP头部压缩算法
- 两跳簇结构在多媒体传感器网络中的图像传输优化
- IOI冬令营动态规划详解:历年竞赛高频题解析
- 无线传感器网络QoS路由算法挑战与资源优化研究
- 多媒体传感器网络技术探析与研究趋势
- Allegro转Gerber详细步骤与注意事项
- 商场销售数据分析:关联规则挖掘的应用与价值
- 基于Internet的企业进销存管理系统设计与应用
- 掌握指针基础:类型、指向类型与地址理解
- JavaScript全攻略:从基础到高级应用
- 软件测试资格认证:高级检验员试题解析与重点
- C++编程高质量指南:结构、命名与内存管理
