Linux内核SocketCAN:官方CAN接口详解与应用
需积分: 15 169 浏览量
更新于2024-09-07
收藏 738KB PDF 举报
SocketCAN是Linux内核中官方的CAN(Controller Area Network)API,它在大约三年前被引入,旨在提供一个多用户、硬件独立的基于套接字的通信和配置接口,使得CAN网络在Linux系统中的应用更加便捷和灵活。这个API的设计目标在于通过统一的接口支持各种CAN芯片组,并适用于不同体系结构和总线类型。
SocketCAN的核心理念是基于网络编程模型的套接字技术,将CAN通信抽象成一种标准的服务,用户无需深入了解底层硬件细节就能进行数据传输。这种设计的优点包括:
1. **多用户兼容性**:SocketCAN允许多个用户进程同时访问CAN总线,增强了系统的并发性和可扩展性。
2. **硬件无关**:它提供了一个通用的接口,开发者无需关心特定的CAN控制器或硬件,简化了软件开发工作。
3. **协议灵活性**:支持用户空间的协议,如SOCK_RAW,用于发送和接收原始CAN帧,便于高级应用定制通信协议。
然而,尽管SocketCAN有许多优点,但也存在一些挑战和限制,例如:
- **与传统Linux CAN栈比较**:尽管SocketCAN在易用性和跨平台性上有所进步,但可能在性能上不如针对特定CAN栈优化的实现,特别是在实时性要求高的场景下。
- **协议支持**:尽管文章提到将实现ISO TP/PANDA J1939等协议,但当前可能并非所有标准都得到完全支持,开发者仍需关注这些协议的适配情况。
在使用SocketCAN时,一个典型的流程是编写用户空间程序,通过调用内核提供的驱动接口来操作CAN设备。例如,使用SOCK_RAW套接字,程序员可以创建一个简单的程序来发送和接收CAN帧,如下所示:
```c
#include <linux/can.h>
#include <sys/socket.h>
int main() {
struct sockaddr_can addr;
int sock = socket(PF_CAN, SOCK_RAW, CAN_RAW);
if (sock < 0) {
// 处理错误...
}
addr.can_family = AF_CAN;
addr.can_ifindex = 0; // 设置CAN设备索引
if (bind(sock, (struct sockaddr *)&addr, sizeof(addr)) < 0) {
// 处理错误...
}
// 发送CAN帧...
struct can_frame frame;
frame.can_id = 0xABCDEF; // ID
frame.data[0] = 0x12; // 数据
send(sock, &frame, sizeof(frame), 0);
// 接收CAN帧...
char buffer[CAN_MAX_DLEN];
ssize_t bytes_received = recv(sock, buffer, sizeof(buffer), 0);
if (bytes_received > 0) {
// 处理接收到的帧...
}
close(sock);
return 0;
}
```
SocketCAN作为Linux内核的官方CAN API,为系统提供了强大的功能和灵活性,但在实际应用中仍需根据具体需求权衡其性能和易用性。随着未来的发展,SocketCAN会继续优化和增强,以适应更多行业标准和实时通信需求。
iCC 2012 CAN in Automation
05-17
SocketCAN - The official CAN API of the Linux kernel
Marc Kleine-Budde, Pengutronix
SocketCAN, the official CAN API of the Linux kernel, has been included in the kernel more
than 3 years ago. Meanwhile, the official Linux repository has device drivers for all major
CAN chipsets used in various architectures and bus types. SocketCAN offers the user a
multiuser capable as well as hardware independent socket-based API for CAN based
communication and configuration. In this paper we will at first focus on motivating the
socket based approach used in SocketCAN and continue with a discussion about its
supporting and opposing arguments and current limitations especially in comparison with
other available Linux CAN stacks. We proceed with a close look at the structure and duties
of a generic CAN driver. The usage of the most widespread userspace protocol for sending
and receiving raw CAN frames (SOCK_RAW) is illustrated with a small program. The paper
concludes with some remarks on the outlook of upcoming contributions and enhancements
such as an isotp and a J1939 protocol implementation.
The first ideas of a socket based networking
stack for CAN devices go back to 2002. There
were several CAN implementations for Linux
available back then, and some still are.
They take the classic character device
approach, each CAN controller forming a
device node, similar to serial device drivers,
disregarding the Linux networking stack. These
device nodes provide a simple, to some extent
abstract interface to both send and receive
CAN frames and configure the CAN controller.
Some of these projects are community driven
while others being provided by hardware
vendors. This and the nonstandard Linux CAN
driver model approach has led to several
drawbacks:
i
! Change of CAN hardware vendor urges
the adaptation of the CAN application.
! Higher protocol levels and complex
filtering have to be implemented in the
userspace application.
! Only one application can use a CAN
interface at a time.
Evolution of the character device drivers
LinCAN, which is part of the OCERA project, is
based on “can-0.7.1” (originally created by
Arnaud Westenberg) and addresses some of
the already mentioned drawbacks. Especially
the limitation to a single application per CAN
interface has been removed by adding a
“message processing” layer based on an
“oriented graph of FIFOs”
ii
.
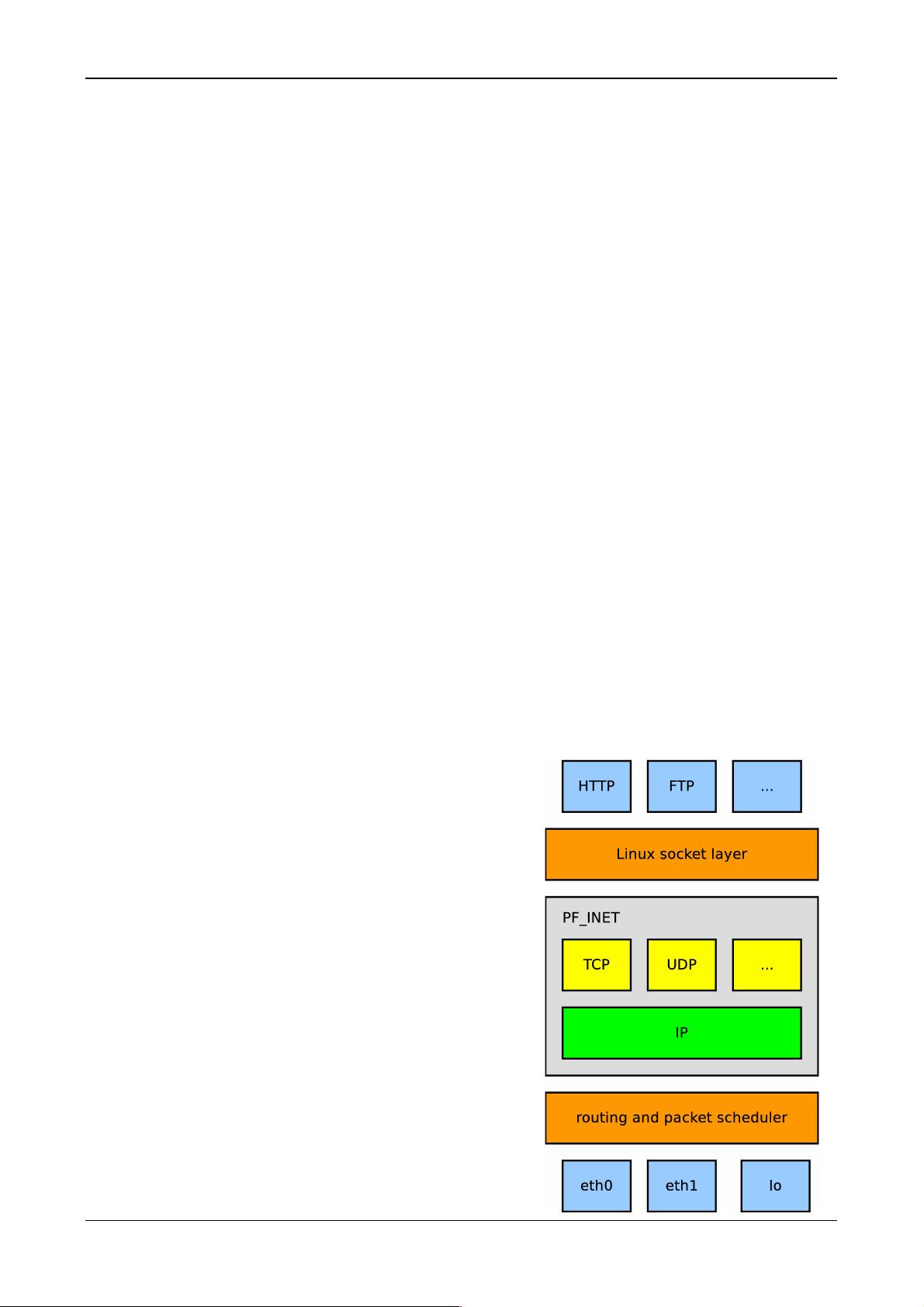
The Linux networking subsystem
The Linux networking subsystem, widely
known for the implementation of the
TCP/IP protocol suite, is highly flexible.
Next to IPv6 and IPv4, it contains several
other networking protocols such as ATM,
ISDN and the kernel part of the official
Linux Bluetooth stack.
下载后可阅读完整内容,剩余5页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2024-01-05 上传
2007-10-24 上传
2010-02-22 上传
2021-04-06 上传
2006-02-23 上传
2021-03-11 上传

gaorong
- 粉丝: 1
- 资源: 10
 我的内容管理
展开
我的内容管理
展开







最新资源
- JavaScript实现的高效pomodoro时钟教程
- CMake 3.25.3版本发布:程序员必备构建工具
- 直流无刷电机控制技术项目源码集合
- Ak Kamal电子安全客户端加载器-CRX插件介绍
- 揭露流氓软件:月息背后的秘密
- 京东自动抢购茅台脚本指南:如何设置eid与fp参数
- 动态格式化Matlab轴刻度标签 - ticklabelformat实用教程
- DSTUHack2021后端接口与Go语言实现解析
- CMake 3.25.2版本Linux软件包发布
- Node.js网络数据抓取技术深入解析
- QRSorteios-crx扩展:优化税务文件扫描流程
- 掌握JavaScript中的算法技巧
- Rails+React打造MF员工租房解决方案
- Utsanjan:自学成才的UI/UX设计师与技术博客作者
- CMake 3.25.2版本发布,支持Windows x86_64架构
- AR_RENTAL平台:HTML技术在增强现实领域的应用
