EFAV-MERD:水下声学传感器网络的路由协议
92 浏览量
更新于2024-08-27
收藏 343KB PDF 举报
"EFAV-MERD是一种针对水下声学传感器网络(UASNs)的路由协议,旨在提高网络的可靠性,降低端到端延迟和能量消耗。该协议基于预期转发区域体积和剩余距离的数学期望进行设计,以应对UASNs特有的挑战,如长变传播延迟、三维环境中的高移动性、有限带宽、能量约束、噪声以及多径等问题。"
EFAV-MERD,即预期转发区域体积和剩余距离数学期望路由协议,是为了解决水下声学传感器网络的独特问题而提出的。在UASNs中,由于声波通信的特性,通信延迟大且易受环境影响,同时节点通常具有有限的能源,需要高效节能的路由策略。EFAV-MERD通过考虑预期的转发区域体积和节点的剩余距离来优化数据传输。
预期转发区域体积(Expected Forwarding Area Volume, EFAV)是指一个节点能够成功转发数据包到下一跳的概率空间。这个概念考虑了节点之间的距离、传播条件以及可能的多径效应。通过计算每个节点的EFAV,协议可以确定最佳的转发节点,从而减少数据包的丢失和重传,提高网络的可靠性。
剩余距离的数学期望(Mathematical Expectation of Residual Distance, MERD)则关注节点的剩余能量和到目标的距离。在UASNs中,节点的能量消耗与通信距离密切相关。因此,选择具有较长剩余距离的节点作为转发者可以降低整个路径的能量消耗,延长网络的生存时间。
EFAV-MERD协议的工作流程可能包括以下几个步骤:
1. **节点评估**:每个节点根据其当前的位置、能量状态以及与邻居节点的相对位置计算其EFAV和MERD。
2. **路由决策**:当数据包到达一个节点时,该节点将基于EFAV和MERD来决定是否转发数据包以及选择哪个邻居节点作为下一跳。
3. **动态调整**:协议会动态地适应网络变化,如节点移动、能量耗尽或通信条件的变化,不断更新路由选择。
4. **路径优化**:通过持续监控和调整,EFAV-MERD致力于构建一条具有最小延迟和能量成本的路径。
EFAV-MERD协议是UASNs中的一种创新解决方案,它结合了空间和能量效率,以提高网络性能。通过这种智能路由策略,研究人员期望能够在恶劣的水下环境中实现更可靠、低延迟和节能的数据传输。
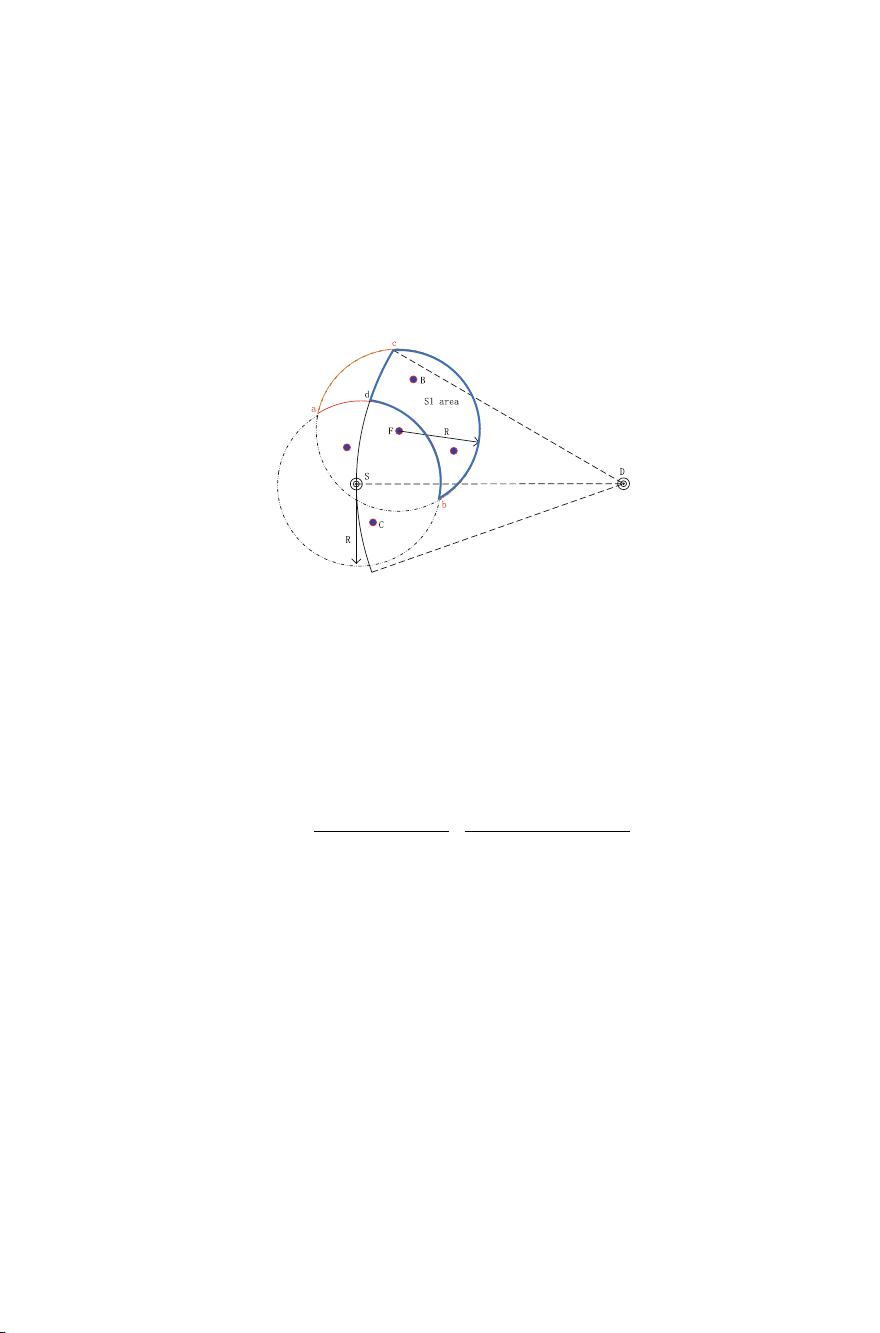
Definition 1 (effective forwarding region, simply as EFR in the rest of this paper).
EFR of a packet is defined as follows: if node A forwards packet P received from node
S and node D is sink node, the effective forwarding region of P next hop is defined as
fttF
*
R \ tS
*
[ R \ tD
*
\ SD
*
g.
For example, as shown in Fig. 1 , node F receives a packet forwarded or sent by
node S, the EFR of the packet next hop is the region represented by shape abd, the
region enclosed by blue curves.
2.1 Compute Holding Time
When node F receives a packet forwarded by node A, it will compute the holding time
of the packet if the packet is received for the first time. Node s S and D are the source
node and destination node(sink node) of the packet. The holding time of the packet is
computed according to formula (1).
T
holding
¼ð
V inf ðVÞ
supðVÞinf ðVÞ
=
ME inf ðMEÞ
supðMEÞinf ðMEÞ
ÞT
Delay
þðR FA
*
Þ=v
sound
ð1Þ
where V denotes the volume of EFR and ME denotes the mathematical expectation of
residual distance of next forwarding node to sink. T
Delay
is expressed as formula (2),
namely the maximum propagation delay of one hop:
T
Delay
¼ R=v
sound
ð2Þ
In order to reduce the calcul ation complexity, Monte Carlo [20] method is used to
calculate the volume of EFR since the computation of volume of irregular shapes
satisfied the application conditions of Monte Carlo methods.
Now, we compute ME in formula (1). As shown in Fig. 2, the mathematical
expectation of residual distance to sink is expressed as below:
Fig. 1. Example for EFR.
EFAV-MERD: Expected Forwarding Area Volume 705
剩余10页未读,继续阅读
2021-06-29 上传
点击了解资源详情
2024-11-25 上传
2024-11-25 上传
2024-11-25 上传
2024-11-25 上传
2024-11-25 上传
2024-11-25 上传

weixin_38682242
- 粉丝: 5
- 资源: 991
 我的内容管理
展开
我的内容管理
展开







最新资源
- 正整数数组验证库:确保值符合正整数规则
- 系统移植工具集:镜像、工具链及其他必备软件包
- 掌握JavaScript加密技术:客户端加密核心要点
- AWS环境下Java应用的构建与优化指南
- Grav插件动态调整上传图像大小提高性能
- InversifyJS示例应用:演示OOP与依赖注入
- Laravel与Workerman构建PHP WebSocket即时通讯解决方案
- 前端开发利器:SPRjs快速粘合JavaScript文件脚本
- Windows平台RNNoise演示及编译方法说明
- GitHub Action实现站点自动化部署到网格环境
- Delphi实现磁盘容量检测与柱状图展示
- 亲测可用的简易微信抽奖小程序源码分享
- 如何利用JD抢单助手提升秒杀成功率
- 快速部署WordPress:使用Docker和generator-docker-wordpress
- 探索多功能计算器:日志记录与数据转换能力
- WearableSensing: 使用Java连接Zephyr Bioharness数据到服务器
