基于AprilTag的智能小车定位追踪系统设计与实现
版权申诉
本文档探讨了基于AprilTag的智能小车拓展定位追踪应用,由何浩楠、陈宇涛、蒋占阳、陈健和施一剑等人合作完成,发表于2020年的《现代信息科技》第16期。AprilTag是一种广泛应用在视觉定位领域的标记系统,它结合了二维码技术和视觉识别技术,使得在复杂环境中实现精确的定位成为可能。
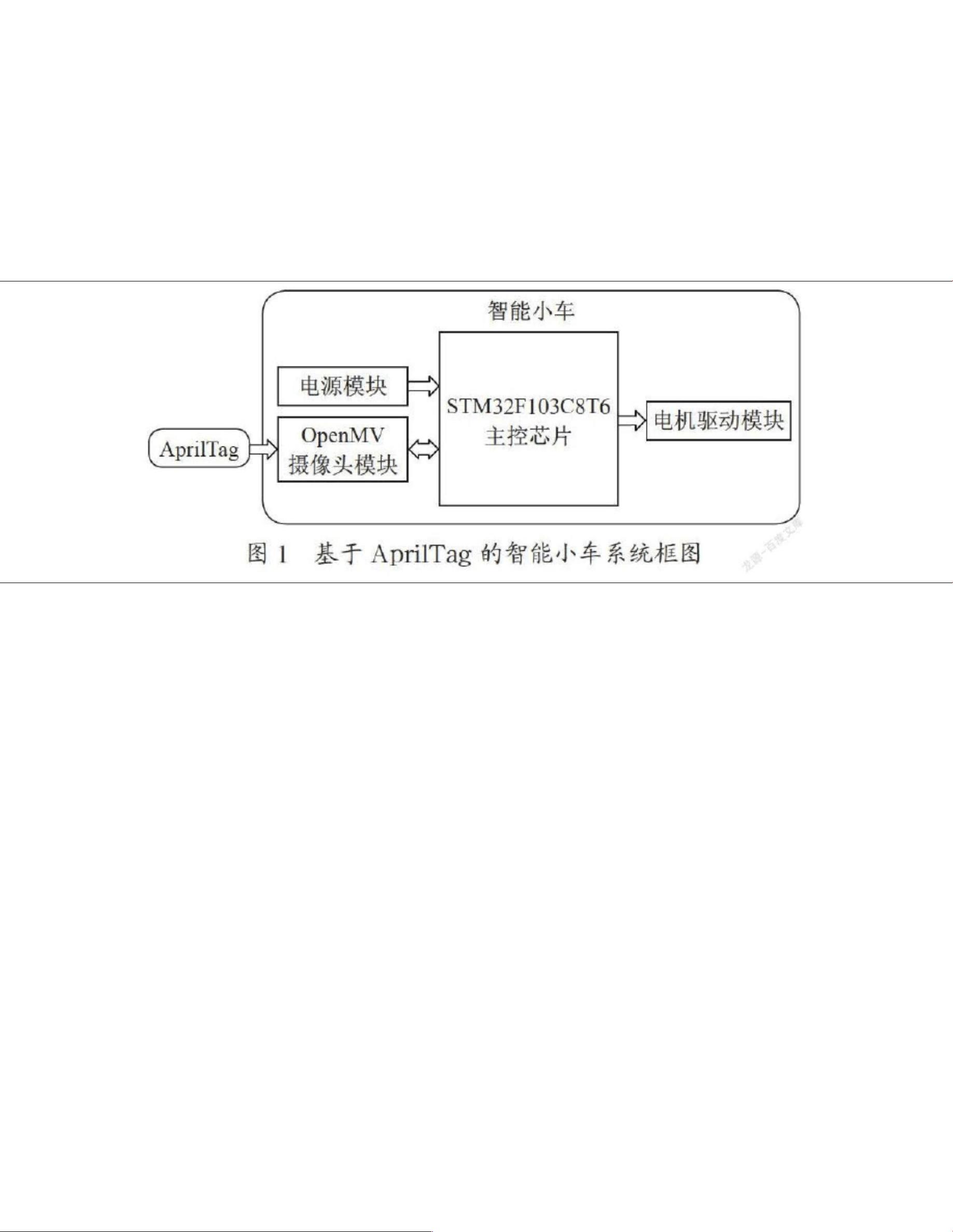
在这个研究项目中,作者构建了一个自动驾驶智能小车的模拟系统,主要目标是实现倒车入库和追踪行驶功能。系统的核心技术包括OpenMV视觉模块,它负责捕捉摄像头传来的AprilTag图像,利用MicroPython编程语言解析这些图像,识别出AprilTag的位置信息。AprilTag的存在提供了稳定的视觉特征,这对于自动驾驶中的定位至关重要。
识别到AprilTag后,系统通过串口通信将AprilTag相对于摄像头的精确三维坐标传输给智能小车搭载的STM32单片机。STM32单片机根据接收到的位置数据,调控智能小车的行驶方向和速度,从而确保其在执行自动泊车任务时能准确地停在预定位置,同时在追踪行驶模式下能保持对预设目标的跟随。
这项工作证明了将OpenMV视觉追踪、AprilTag定位技术和STM32单片机控制相结合的方法是有效的,它不仅实现了智能小车的自动泊车功能,还具备了追踪行驶的能力。该研究对于提升自动驾驶系统的定位精度和智能化水平具有实际意义,也为其他领域的机器人或自动化设备提供了一种实用的定位解决方案。
本文的关键点包括:
1. OpenMV视觉模块的使用:作为前端传感器,负责实时捕获和处理AprilTag图像。
2. AprilTag的定位技术:通过视觉识别提供稳定且可重复的定位信号。
3. MicroPython编程:用于处理图像识别算法,实现AprilTag的定位信息处理。
4. STM32单片机控制:接收定位数据,驱动智能小车的运动控制。
5. 自动泊车与追踪行驶功能:通过集成以上技术,实现车辆自主导航与路径跟踪。
这个研究对智能交通、机器人技术以及物联网等领域的发展具有积极的推动作用,展示了智能小车在实际应用场景中的潜力和价值。
基于 AprilTag 的智能小车拓展定位追踪应
用
作者:何浩楠 陈宇涛 蒋占阳 陈健 施一剑
来源:《现代信息科技》2020 年第 16 期
下载后可阅读完整内容,剩余9页未读,立即下载
220 浏览量
651 浏览量
236 浏览量
2023-02-26 上传

竖子敢尔
- 粉丝: 1w+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 武汉大学数字图像处理课程课件精要
- 搭建个性化知识付费平台——Laravel开发MeEdu教程
- SSD7练习7完整解答指南
- Android中文API合集第三版:开发者必备指南
- Python测试自动化实践:深入理解更多测试案例
- 中国风室内装饰网站模板设计发布
- Android情景模式中音量定时控制与铃声设置技巧
- 温度城市的TypeScript实践应用
- 新版高通QPST刷机工具下载支持高通CPU
- C++实现24点问题求解的源代码
- 核电厂水处理系统的自动化控制解决方案
- 自定义进度条组件AMProgressView用于统计与下载进度展示
- 中国古典红木家具网页模板免费下载
- CSS定位技术之Position-master解析
- 复选框状态持久化及其日期同步技术
- Winform版HTML编辑器:强大功能与广泛适用性
