DSP/BIOS入门教程:刘鑫茂解析实时操作系统
需积分: 10 160 浏览量
更新于2024-07-17
收藏 944KB PDF 举报
"刘鑫茂的DSP_BIOS讲座.pdf"
这篇讲座详细介绍了TI公司的实时操作系统DSP/BIOS在数字信号处理器(DSP)上的应用及其工作原理。DSP/BIOS是一个专门为实时性和性能要求高的应用程序设计的嵌入式实时操作系统。虽然在某些简单项目中,超循环程序可能足以满足需求,但在需要高效任务调度和严格实时性的场景下,DSP/BIOS能提供更专业的解决方案。
作者刘鑫茂指出,DSP/BIOS的主要优点包括其强大的任务调度能力,支持抢占式多线程,确保高优先级任务总能在规定时间内执行。此外,它还提供了硬件抽象层,简化了硬件交互,以及实时分析和配置工具,帮助开发者进行系统优化和调试。
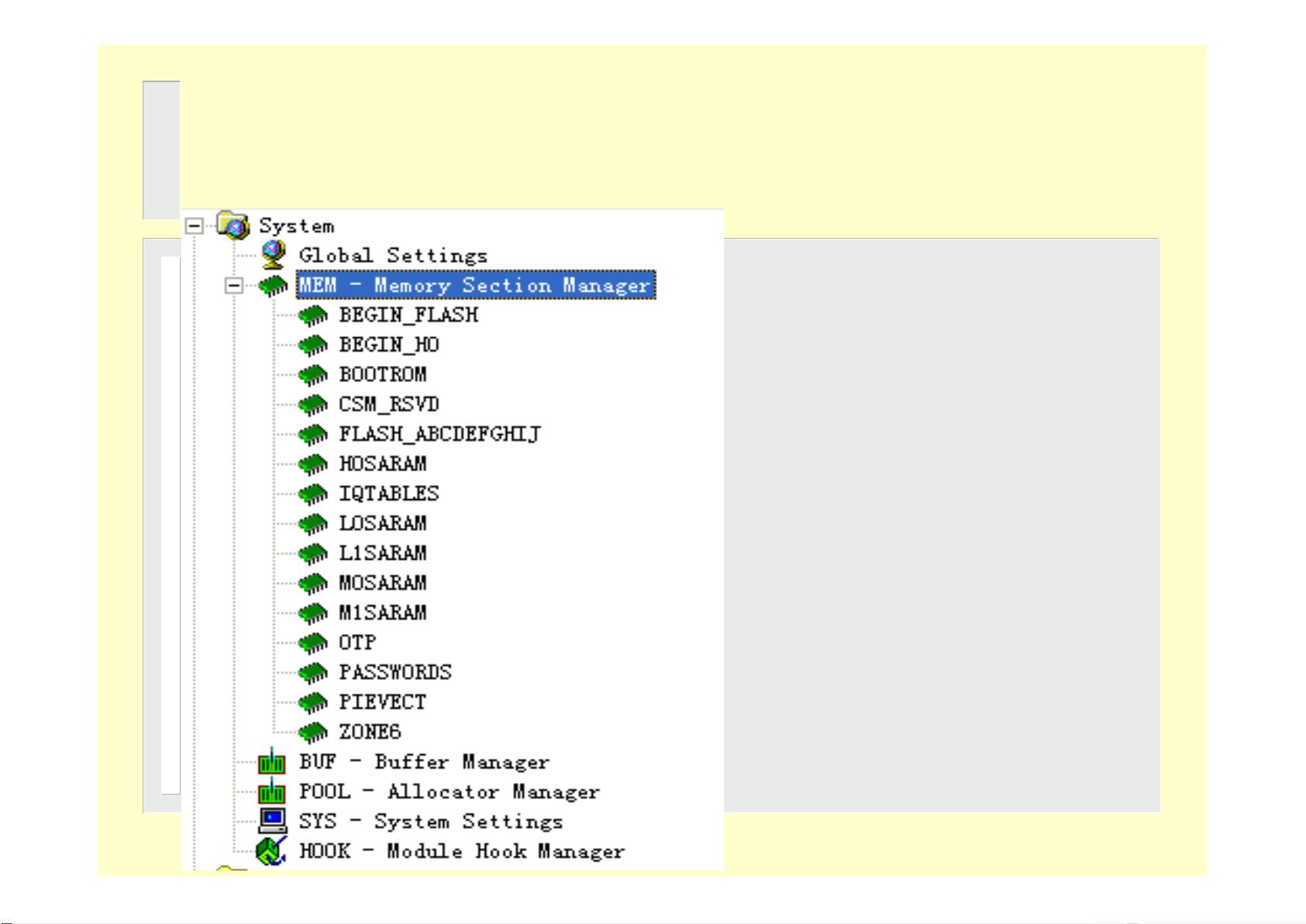
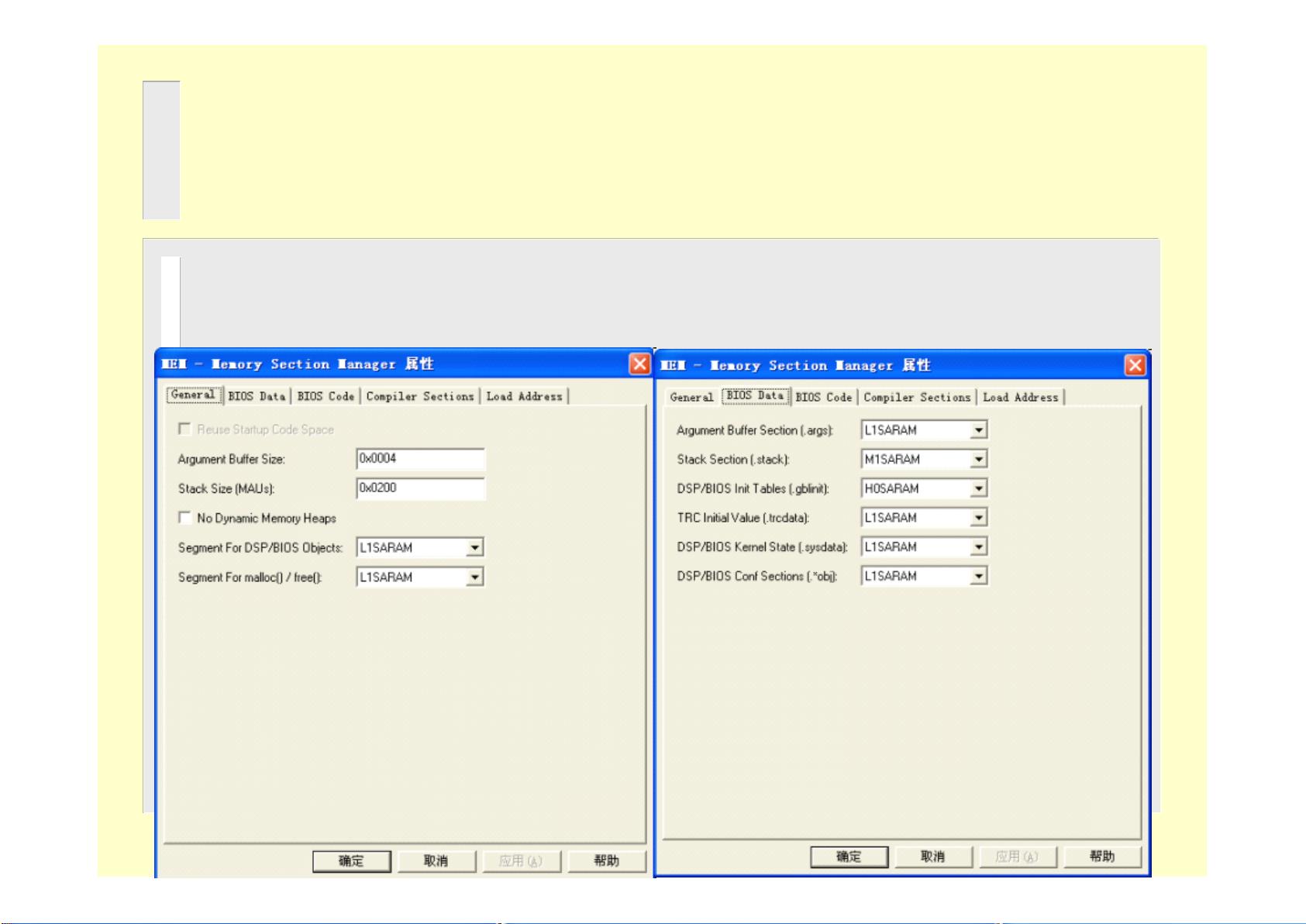
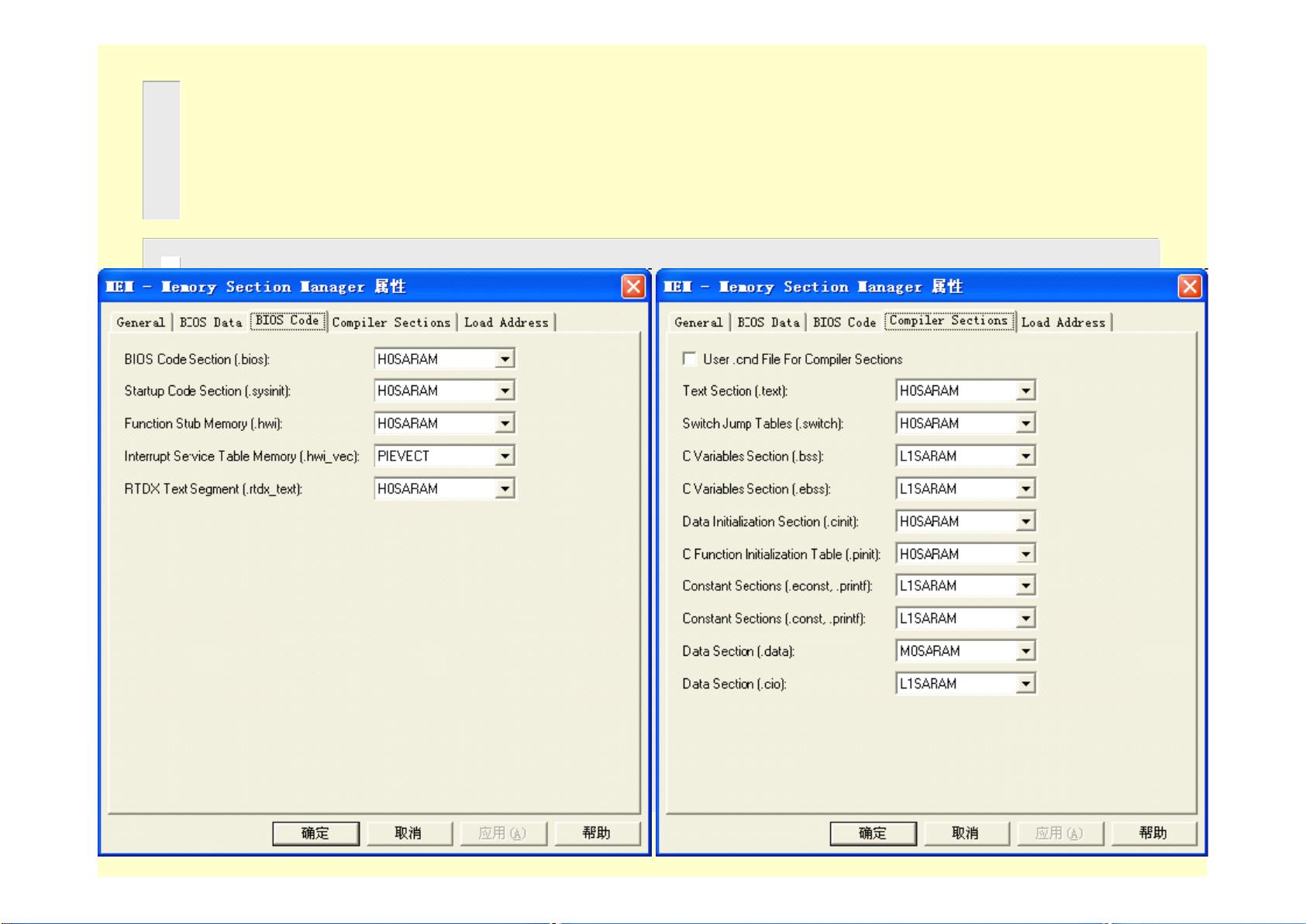
DSP/BIOS的配置是一项重要工作,可以通过图形用户界面和文本方式进行。配置工具包括系统配置、分析工具、任务调度、任务同步和输入输出等模块,其中前四个是开发者应重点掌握的。在遇到配置错误时,通常需要结合这两种方式来解决问题。
讲座内容深入浅出,旨在帮助初学者理解和入门DSP/BIOS的使用。通过学习,开发者不仅能认识BIOS,还能掌握基本的API,进行实际的项目开发。尽管DSP/BIOS可能对初学者显得有些复杂,但作者鼓励大家不必惧怕,只要投入学习,就能掌握这一强大的工具。
DSP/BIOS是嵌入式领域尤其是DSP应用中不可或缺的一部分,它能提高系统的效率和可靠性,使得开发者能够更好地管理和控制复杂的实时任务。通过学习和使用DSP/BIOS,开发者可以进入实时操作系统开发的广阔天地,为项目带来更高的性能和灵活性。
2022-09-20 上传
2022-09-14 上传
2022-09-23 上传
2021-09-06 上传

inodacon
- 粉丝: 1
- 资源: 16
 我的内容管理
展开
我的内容管理
展开







最新资源
- 开源数据结构:全球开源项目中使用的数据结构
- quiron:Modulo QtQuick para cargar en Unik Qml Engine-Modulo deaplicaciónpara Ayuda Memoria de DatosAstrológicos
- accyrding-policy-aloha.zip_TreeView控件_Visual_Basic_
- LogKyrcach
- 算法和数据结构:使用JavaScript实现的常见排序算法,数据结构和其他算法挑战的交互式概述
- led发光管(PE).rar_嵌入式/单片机/硬件编程_C/C++_
- 用于读取和写入图像数据的Python库-Python开发
- 第十三届中国大学生服务外包创新创业大赛-A08基于 FPGA 的铝片表面工业缺陷检测系统
- gdxextras:Libgdx的一些额外工具
- clean-undefined:删除未定义的对象字段
- Women-in-Big-Data-South-Africa:本笔记本介绍了Zindi竞赛(南非大数据中的女性-南非女性为户主的家庭)。 我们将快速浏览数据,展示如何创建模型,估算您在Zindi上获得的得分,准备提交并进入排行榜。 我还提供了一些有关如何获得更高分数的提示-一旦您第一次提交,这些都可能给您一些下一步尝试的想法
- 正方教务通用安卓
- libradio-开源
- 数据结构算法:此存储库包括我在本科期间所做的数据结构程序和算法。 这些是我自己用C ++从头开始编写的功能齐全的算法。 -要求:Microsoft Visual Studio 2019-打开sln文件以打开整个项目
- lilt:Lilt终端模拟器-用于Linux,macOS和其他类似Unix的系统的简单便携式终端模拟器
- siptapi-开源
