MATLAB预测控制工具箱:伺服系统与造纸机控制器设计实例
"本资源是关于使用MATLAB进行预测控制(MPC)的教程,重点关注伺服系统和造纸机控制器的设计。教程中包含了MATLAB自带的设计示例,详细讲解了如何建立数学模型,设定控制目标与约束,并在MATLAB环境中定义状态空间模型。"
在MATLAB中,预测控制是一种先进的控制策略,它利用未来的预测信息来优化当前的控制决策。MATLAB提供了MPC工具箱,使得这种复杂的控制设计变得相对简单和直观。在这个实例中,我们将深入探讨如何使用MPC工具箱设计伺服系统控制器。
伺服系统控制器的设计通常涉及到位置伺服系统,如描述中提到的,由直流电机、变速箱、弹性轴和负载等部分组成。系统的行为可以通过一组微分方程来描述,这些方程可以转换成状态空间表示。例如,一个二阶系统可能具有位置和速度作为状态变量。在这个例子中,系统模型被定义为:
\[
\dot{x}(t) = Ax(t) + Bu(t)
\]
其中,\( x(t) \) 是状态向量,\( A \) 是状态矩阵,\( B \) 是输入矩阵,\( u(t) \) 是控制输入,即电压 \( V \)。
控制目标是让过载角位置 \( \theta \) 跟踪给定的参考值。考虑到实际系统的约束,比如弹性轴承受的力矩不能超过某个限制,以及输入电压也有上限,这些都需要在设计控制器时予以考虑。此外,系统有两个输出:可测量的位置 \( \theta \) 和不可测量的力矩 \( T \),只有一个输入电压 \( V \)。
在MATLAB中实现这个伺服系统模型,可以使用内置的函数 `mpcmotormodel`,或者直接编写状态空间方程的代码。例如:
```matlab
A = [0 1; -1/(Jmotor*Lshaft), -Bmotor/Jmotor];
B = [0; 1/(Jmotor*Lshaft)];
C = [1 0];
D = 0;
sys = ss(A,B,C,D);
```
这里的 `sys` 就是定义好的状态空间模型。然后,可以利用MPC工具箱创建控制器对象,设置预测步长、约束条件等参数,最后应用到系统上以实现预期的控制性能。
造纸机控制器的设计虽然未在提供的内容中详细展开,但其基本步骤与伺服系统类似,只是涉及到的物理过程和动态模型会有所不同,可能需要考虑更多的状态变量和更复杂的约束条件。
通过这样的实践,学习者可以深入理解MPC的基本原理,掌握如何在MATLAB环境中构建和优化预测控制器,这对于工业自动化和过程控制领域的工程师来说是非常有价值的技能。
5
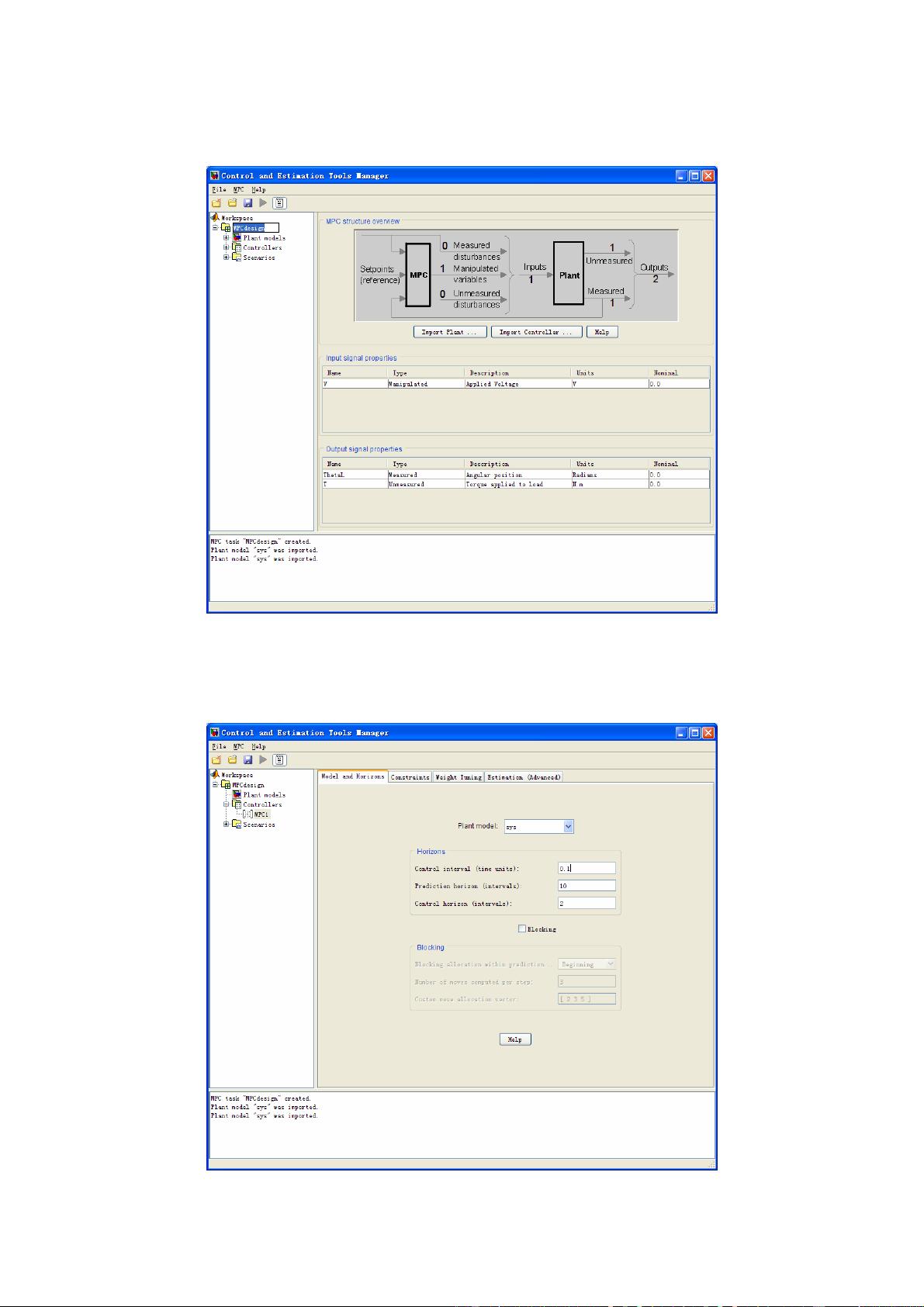
可以修改输入变量和输出变量的名称,增加描述性内容,设置单位和初始值。此处将
In1,Out1,Out2 修改为 V,ThetaL,T,其它修改见图 4-3。
图 4-3 Design Tool After Importing the Plant Model and Specifying Signal Properties
本例中的模型为连续系统,需要将之变为离散系统。选中
MPCdesign---Controllers---MPC1---Model and Horizons,将 Control interval(time units)(采样
周期)改为 0.1,其它设置不变,见图 4-4。
剩余21页未读,继续阅读
2022-09-22 上传
619 浏览量
104 浏览量
2022-07-15 上传
2022-07-14 上传
2022-07-14 上传
2022-07-15 上传
140 浏览量

mamu258377566
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- Next.js入门指南与部署教程
- 现浇钢筋砼空心板空心管的设计与应用研究
- 风机全自动控制PLC程序源代码解析
- Apk2src反编译工具:ActivePerl_5.16.2.3010812913.msi使用指南
- 仿华为日落动画实现技术解析与安卓效果展示
- SQLite与Python3的数据处理与导出实践
- STK软件在获取航天器二维转动指向角度的应用研究
- Qt4.8+环境下的sqlite3封装源代码详解
- PowerBuilder界面设计技巧与实践
- 51单片机典型应用开发范例大全第3版
- MPI 2018.1.163版本下载与配套资源分享
- Azureus Vuze BT下载器5.7.6.0版本特性与下载指南
- 瓦楞纸生产与水循环封闭系统的创新设计
- AppEngine MapReduce源码包压缩文件解读
- 深入分析CPU-Z:电脑硬件检测神器
- Angular项目预售流程:开发、构建与测试
