Wi-Fi芯片支持的高精度室内定位:协作到达时间(CToA)技术详解
需积分: 10 162 浏览量
更新于2024-07-18
收藏 1.65MB PDF 举报
室内高精度定位技术——协作到达时间(Collaborative Time of Arrival, CToA)是当前Wi-Fi(基于IEEE 802.11标准)室内定位系统的革新方法,旨在提升现有系统的可扩展性。该技术主要利用了现代Wi-Fi芯片集支持的精细定时测量(Fine Timing Measurement, FTM)功能。CToA技术的核心在于它有两种工作模式:客户端模式(Client-Mode)。
在客户端模式下,CToA实现了类似于GPS的室内定位功能,允许无限数量的设备作为独立的定位客户端,无需向网络公开它们的位置信息,从而保护了用户的隐私。这种私密定位能力对于诸如智能家居、商业设施管理、资产追踪等应用场景具有重要意义,因为它能够在不侵犯用户隐私的同时提供精确的位置服务。
IEEE 802.11-17/1387R0标准文档于2017年9月7日提交,由Intel Corporation的Leor Banin、Ofer Bar-Shalom、Nir Dvorecki和Yuval Amizur等人撰写。他们详细介绍了CToA技术的工作原理,强调了其如何利用Wi-Fi的时序测量特性来提升定位精度,并且着重提到了这一技术如何适应不断增长的室内定位需求,确保系统能够在大规模环境中稳定运行。
与传统的Wi-Fi定位技术相比,CToA通过增加设备间的协作,提高了定位的准确性,尤其是在多楼层、多房间或复杂的室内环境,如购物中心、机场航站楼等。通过计算信号到达多个基站的时间差,系统能够更准确地确定接收设备的位置,减少了信号干扰和多径效应带来的误差。
总结来说,CToA是一种革命性的室内定位解决方案,它结合了Wi-Fi技术的精确度和用户隐私保护的需求,为实现高精度、大规模、无痕的室内定位提供了可能。随着Wi-Fi技术的持续发展和芯片集的升级,CToA有望在未来成为主流的室内定位手段。
2
distance w.r.t. another station
1
. The range measurement is
based on high-resolution, time delay estimation, which also
accounts for the latency imposed by the chipset hardware. The
hardware-imposed latency (e.g. the receive/transmit filters’
group-delay and other hardware latencies), is measured and
pre-calibrated by the chipset in order to reach the required
timing resolution. Obtaining an accurate time delay estimate
in a dense-multipath environment is typically implemented
using some super-resolution method , which are applied to the
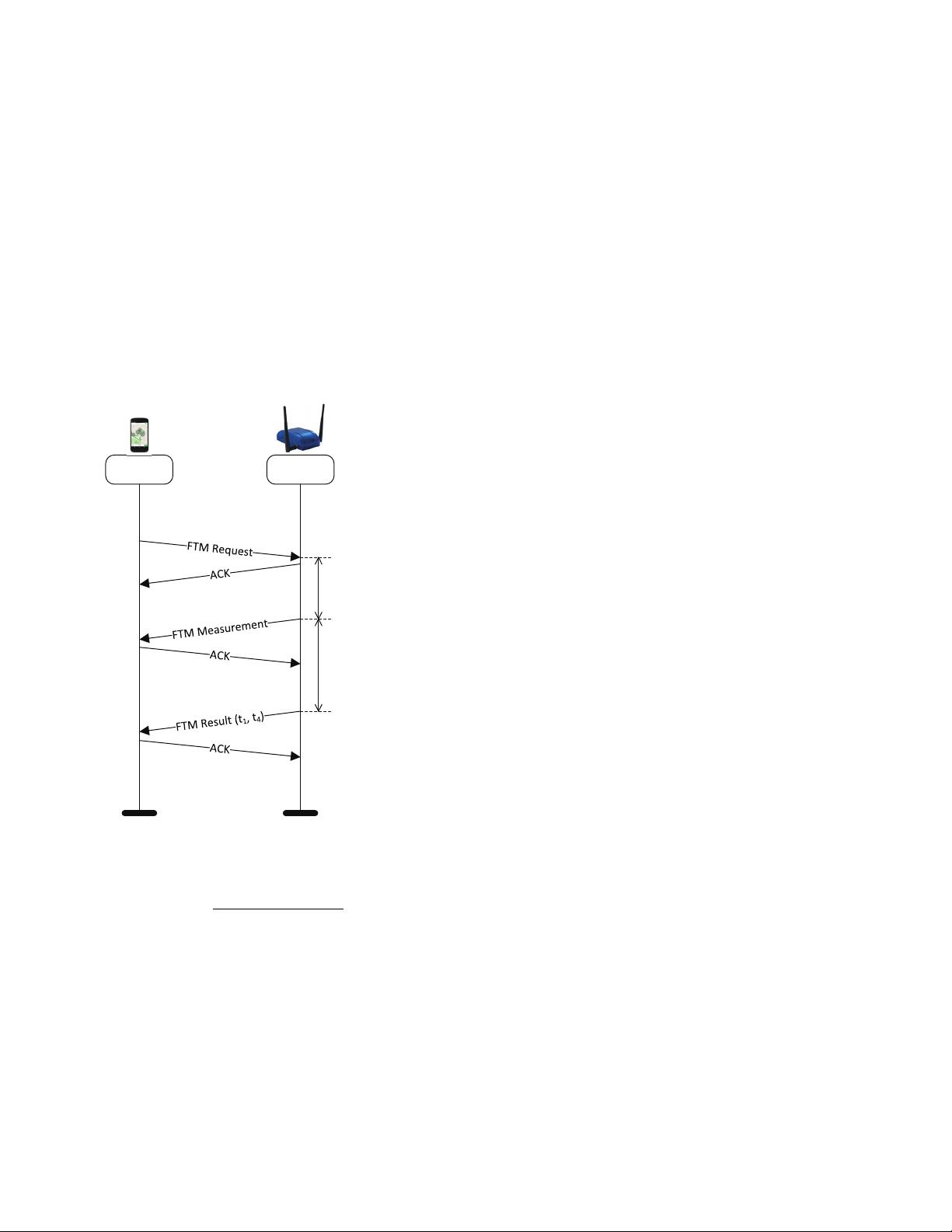
estimated channel response, [9], [10]. FTM is a point-to-point
(P2P), single-user protocol, which includes an exchange of
multiple message frames between an initiating WLAN station
(STA) and a responding STA. The initiating STA attempts to
measure its range w.r.t. the responding station (e.g., WLAN AP
or a dedicated FTM responder). The FTM message sequence
chart is illustrated in Fig. 1. The time of flight (ToF) between
ƚ
ϭ
/ŶŝƚŝĂƚŝŶŐ
^d
ZĞƐƉŽĚŝŶŐ
^d
ƚ
Ϯ
ƚ
ϯ
ƚ
ϰ
ϭϬŵƐ;ƌĞĐŽŵŵĞŶĚĞĚͿ
aϮϬŵƐ
Fig. 1. FTM Protocol Message Flow Example
the two stations is calculated using (1),
ToF =
(t
4
− t
1
) − (t
3
− t
2
)
2
(1)
where t
1
denotes the time of departure (ToD) measured by
responding station, and t
4
denotes the time of arrival (ToA),
which is estimated by the responding station. The values of t
1
and t
4
are reported back to the initiating station
2
after the com-
pletion of the FTM measurement phase. The initiating station
1
Notice that FTM only enables to measure the range between two stations.
Obtaining a position estimate based on multiple range measurements is out
of the standard scope. However, the standard does define mechanisms for the
responding stations to provide their location information (such as, absolute or
relative position coordinates, floor level etc.), in an information element (IE),
called location configuration information (LCI). The LCI of the responding
stations may be used by the initiating station to estimate its absolute or relative
position.
2
The values of t
1
and t
4
are reported at picosecond granularity.
combines these parameters along with its own estimated ToA,
t
2
, and measured ToD, t
3
values, to obtain a range estimate
w.r.t. the responding station
3
. The FTM protocol has first
appeared in the 2016 release of the IEEE802.11
TM
standard
[23] (formerly known as IEEE802.11REVmc). Followed the
standard release, the Wi-Fi alliance - the organization that
promotes Wi-Fi technology - has announced in February 2017
on a Wi-Fi location certification program to certify WLAN
devices complying with the FTM protocol.
Being a P2P, single-user protocol, the FTM protocol is lim-
ited in scenarios where an extremely large number of users are
requesting positioning services simultaneously. Provided no
FTM message transactions are lost on the way due to temporal
channel interruptions, the initiating station should be able to
obtain a range estimate w.r.t. the responding station within
about 30ms. Hence, obtaining its position, which involves
ranges estimation towards 3 additional stations, should ideally
take about 100-120ms. This implies that each FTM responder
may be able to serve about 30 client stations per second.
Clearly, with more and more navigating stations attempting
to execute FTM sessions, the collision likelihood increases,
which effectively decreases the number of stations that can be
serviced. Consider for example, large stadiums hosting rock
concerts or major sports events. In such occasions it is easy
to imagine tens of thousands of users navigating throughout
the stadium area using location-based services. Servicing all
these users might require to deploy a network of thousands of
FTM responders around the stadium. The protocol described
in the sequel, dubbed “collaborative time of arrival” (CToA),
is aimed to provide a more cost-effective solution for such use
cases.
Paper Organization: The remainder of the paper is orga-
nized as follows. Section II gives an overview of the CToA
protocol and its challenges. The mathematical model for the
positioning problem considered, is formulated in section III.
This section is divided into three parts; the first part, ad-
dressed in section III-A, outlines the measurement models
and maximum-likelihood position estimators for client-mode
CToA in the absence of clock-skewness. These measurement
models are then used in section III-B for obtaining measures
for the expected positioning accuracy. The third part, which
is outlined in section III-C, introduces the effect of the clock-
drifts on the measurement models. This section also details
the Kalman filter algorithm that is executed by the client
device and used for estimating and tracking all the time-
varying parameters in the system. System-level simulation
performance are described in section IV. In the appendix
we derive the Cram
´
er-Rao lower bounds for the positioning
problem and the associated concentration ellipses, both of
which are used in the main text to illustrate the theoretical
system performance discussed in section III-B.
Notation: We use lower-case letters to denote scalars,
lower-case, boldface letters to denote vectors, and upper-
case, boldface letters to denote matrices. We further
3
The exchange of the FTM measurement message and its acknowledgement
(ACK) frame, which has to be sent out after exactly a short inter-frame spacing
(SIFS) of 16µs, is assumed to finish within a short period, during which the
clocks of the two stations do not drift appreciably.
剩余14页未读,继续阅读
2021-02-11 上传
2021-04-30 上传
2021-02-10 上传
2019-09-25 上传
2018-12-23 上传
2021-06-15 上传
2021-02-13 上传
2021-02-03 上传
2015-01-31 上传

Michael-y
- 粉丝: 4
- 资源: 12
 我的内容管理
展开
我的内容管理
展开







最新资源
- SSM Java项目:StudentInfo 数据管理与可视化分析
- pyedgar:Python库简化EDGAR数据交互与文档下载
- Node.js环境下wfdb文件解码与实时数据处理
- phpcms v2.2企业级网站管理系统发布
- 美团饿了么优惠券推广工具-uniapp源码
- 基于红外传感器的会议室实时占用率测量系统
- DenseNet-201预训练模型:图像分类的深度学习工具箱
- Java实现和弦移调工具:Transposer-java
- phpMyFAQ 2.5.1 Beta多国语言版:技术项目源码共享平台
- Python自动化源码实现便捷自动下单功能
- Android天气预报应用:查看多城市详细天气信息
- PHPTML类:简化HTML页面创建的PHP开源工具
- Biovec在蛋白质分析中的应用:预测、结构和可视化
- EfficientNet-b0深度学习工具箱模型在MATLAB中的应用
- 2024年河北省技能大赛数字化设计开发样题解析
- 笔记本USB加湿器:便携式设计解决方案
