主动降噪技术详解:信号处理与应用实战
需积分: 35 69 浏览量
更新于2024-07-07
1
收藏 578KB PDF 举报
"Active Noise Control (ANC): A Tutorial Review" 是一篇深入探讨有源噪声控制技术的论文。作者沈国(SENM.KUO)和邓恩·M·摩根(Dennis N. Morgan, IEEE Senior Member)在文中聚焦于实际应用中的主动降噪系统,尤其是针对信号处理算法的实践性和数字信号处理(DSP)在真实世界场景中的实现。
该论文首先介绍了有源噪声控制的基本原理,即通过一系列辅助声源引入相位相反的“反噪声”波,来抵消环境噪声。这些辅助声源通过电子系统连接,并采用特定的信号处理算法来定制噪音消除策略。有源噪声控制的应用范围广泛,包括制造业、工业操作以及消费电子产品等领域。
论文的核心内容是开发并分析单通道宽带前馈控制的基础自适应算法。这个算法随后被扩展到窄带前馈和自适应反馈控制,以应对不同频率范围的噪声。对于多通道情况,作者详细探讨了在线次级路径建模技术,如格子方法、频域方法、子带方法以及递归算法等,这些技术有助于提高系统的性能和鲁棒性。
作者特别强调了实际应用中的挑战,如实时性、准确性以及抗干扰能力,这些都是设计有效ANC系统时必须考虑的关键因素。此外,论文还可能涉及误差分析、系统优化、算法稳定性和计算效率等问题,以及如何在有限的硬件资源下实现高效的主动降噪。
“Active Noise Control: A Tutorial Review”是一篇实用教程,旨在为读者提供从理论到实践的全面指导,帮助理解和掌握有源噪声控制技术在现代生活中的实际应用。通过阅读这篇论文,读者能够深入了解主动降噪系统的各个方面,包括信号处理策略、技术选择以及解决实际问题的策略。
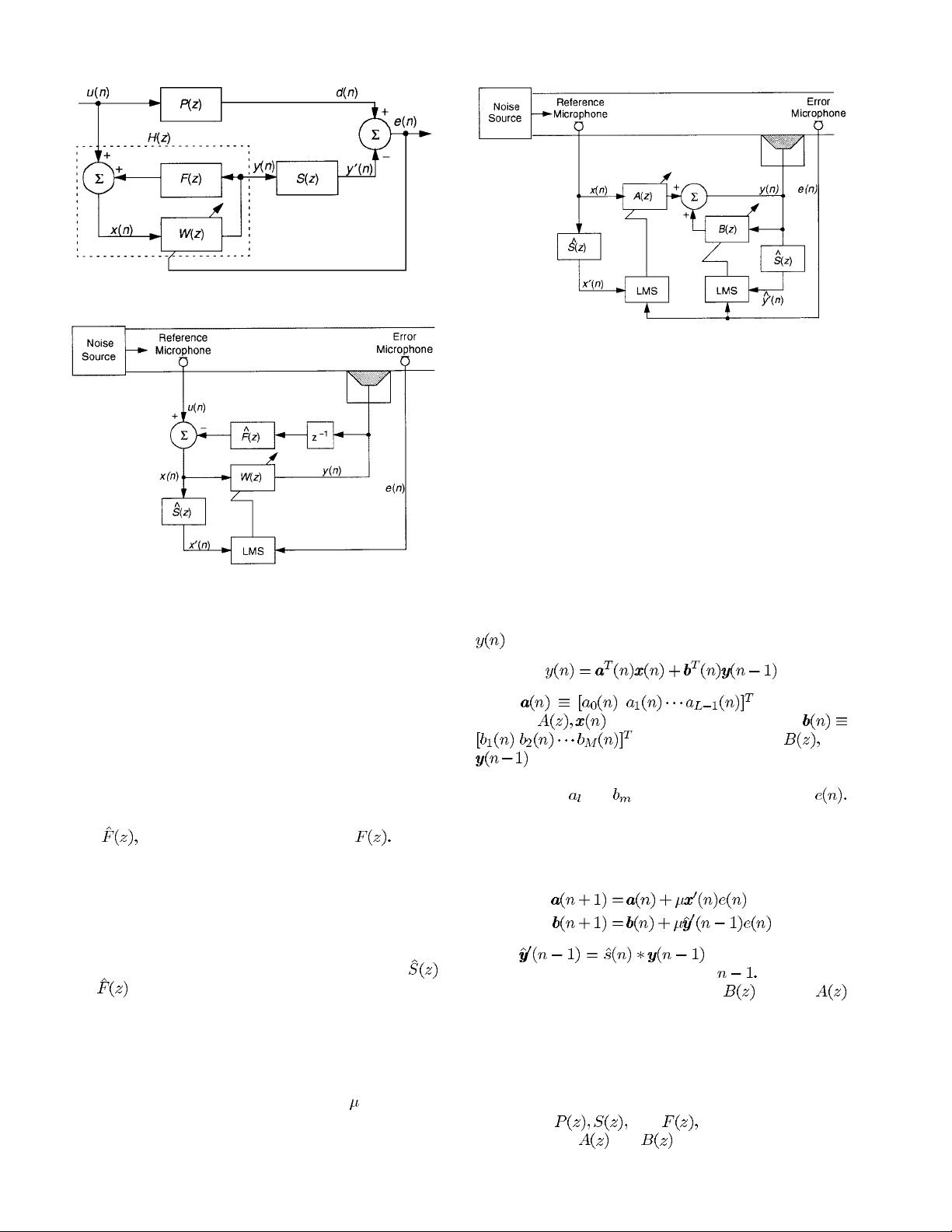
Fig. 6. Block diagram of ANC system with feedback.
Fig. 7. ANC with acoustic feedback neutralization.
1) Feedback Neutralization: The simplest approach to
solving the feedback problem is to use a separate feedback
cancellation, or “neutralization,” filter within the controller,
which is exactly the same technique as used in acoustic echo
cancellation [43]. This electrical model of the feedback
path is driven by the secondary signal, and its output
is subtracted from the reference sensor signal [44]. A
duct-acoustic ANC system using the FXLMS algorithm
with feedback neutralization is illustrated in Fig. 7. The
feedback component of the reference microphone signal
is canceled electronically using a feedback neutralization
filter
which models the feedback path
Since the primary noise is highly correlated with the
antinoise, the adaptation of the feedback neutralization filter
must be inhibited when the ANC system is in operation,
similar to adaptive echo cancellation during periods of
double talk. Thus, feedback neutralization is achieved, in
effect, by using an offline adaptive method for determining
the transfer function of the feedback path. The models
and can be estimated simultaneously by using the
offline modeling technique [4].
2) Adaptive IIR Filter: Equation (14) shows that when
feedback is present, the optimal solution of the adaptive
filter is generally an IIR function with poles and zeros. This
rational function can be approximated by an FIR function
of sufficient order, but a smaller step size
then has to
be used for stability reasons. The poles of an IIR filter
make it possible to obtain well-matched characteristics with
a lower order structure, thus requiring fewer arithmetic
Fig. 8. ANC system using the filtered-U recursive LMS algo-
rithm.
operations [41]. However, the disadvantages of adaptive
IIR filters are: 1) IIR filters are not unconditionally stable
because of the possibility that some pole(s) of the filter
will move outside of the unit circle during the adaptive
process, causing instability; 2) the adaptation may converge
to a local minimum because the MSE function of adaptive
IIR filters is generally nonquadratic; and 3) IIR adaptive
algorithms can have a relatively slow convergence rate
in comparison with that of FIR filters. A comprehensive
discussion of adaptive IIR filters can be found in the
literature [45], [46].
A block diagram of an adaptive IIR ANC system [47]
is illustrated in Fig. 8. The output signal of the IIR filter
is computed as
(16)
where
is the weight
vector of
is the reference signal vector,
is the weight vector of and
is the output signal vector delayed by one sample.
Many algorithms can be employed to find the optimal set
of coefficients
and to minimize the error signal
In 1976, Feintuch [48] suggested that the recursion based
on the old output gradients is negligible. Based on this
suggestion, the “filtered-U recursive LMS algorithm” [49]
for ANC is derived as [4]
(17)
(18)
where
is the filtered version
of the canceling signal vector at time
In practice, it
is reasonable to use a higher order for
than for
[50]. Real-time experiments have been conducted to test
the system performance for various reference microphone
locations, error microphone locations, and different time-
varying sources, such as a centrifugal fan and diesel engine
[51].
Given the complexities associated with the pole-zero
structure of
and one cannot predict the
values to which
and will converge. Also, global
convergence and stability of the filtered-U recursive LMS
948 PROCEEDINGS OF THE IEEE, VOL. 87, NO. 6, JUNE 1999
Authorized licensed use limited to: UNIVERSITY OF SOUTHAMPTON. Downloaded on August 6, 2009 at 09:24 from IEEE Xplore. Restrictions apply.
剩余30页未读,继续阅读
2020-05-07 上传
2017-09-18 上传
2020-07-20 上传
2010-03-15 上传
2021-02-28 上传
2021-02-20 上传
2021-05-04 上传
2021-02-04 上传

干点正事吧巴巴托丝
- 粉丝: 13
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- Python中快速友好的MessagePack序列化库msgspec
- 大学生社团管理系统设计与实现
- 基于Netbeans和JavaFX的宿舍管理系统开发与实践
- NodeJS打造Discord机器人:kazzcord功能全解析
- 小学教学与管理一体化:校务管理系统v***
- AppDeploy neXtGen:无需代理的Windows AD集成软件自动分发
- 基于SSM和JSP技术的网上商城系统开发
- 探索ANOIRA16的GitHub托管测试网站之路
- 语音性别识别:机器学习模型的精确度提升策略
- 利用MATLAB代码让古董486电脑焕发新生
- Erlang VM上的分布式生命游戏实现与Elixir设计
- 一键下载管理 - Go to Downloads-crx插件
- Java SSM框架开发的客户关系管理系统
- 使用SQL数据库和Django开发应用程序指南
- Spring Security实战指南:详细示例与应用
- Quarkus项目测试展示柜:Cucumber与FitNesse实践
