四轴飞行器目标跟踪:算法与应用
版权申诉
98 浏览量
更新于2024-06-28
收藏 1.77MB DOCX 举报
"该文档详细探讨了一种小型四轴飞行器目标跟踪控制算法,强调了四轴飞行器在智慧监控、物流、农业等多个领域的广泛应用,并介绍了目标检测与跟踪的重要性和技术挑战。文档还概述了目标检测算法(如one-stage和two-stage)以及目标跟踪算法的不同类别,特别提到了基于相关滤波的高效跟踪方法。"
在小型四轴飞行器的目标跟踪控制中,无人机需要通过摄像头捕获图像,然后利用图像处理技术识别和跟踪目标。目标检测算法通常分为两类:one-stage和two-stage。two-stage算法,如R-CNN系列,首先生成候选区域,然后进行分类,而one-stage算法如SSD和YOLO则直接进行目标分类和定位,减少了计算步骤,提高了效率。
目标跟踪算法主要包括基于目标模型建模、基于搜索、基于相关滤波和深度学习方法。基于模型建模和搜索的方法在目标变化或遮挡时容易失效,且速度较慢,不适用于实时系统。然而,基于相关滤波的算法,如KCF,因其高速处理能力而适用于实时跟踪。尽管深度学习方法在目标跟踪中展现出强大的潜力,但由于训练数据的限制,尤其是在实时跟踪中,其性能可能会受到影响。
文献中提到的一些早期工作,如[4]和[5],提出了结合颜色和形状特征的目标跟踪策略,这些策略能帮助四轴飞行器根据目标的特定属性进行精确跟踪。这些研究为四轴飞行器的自主导航和控制提供了基础,进一步推动了无人机在复杂环境下的智能化应用。
总结来说,这篇文档深入讨论了小型四轴飞行器在目标检测和跟踪控制上的关键技术,分析了各种算法的优缺点,对于理解无人机视觉跟踪系统的运作机制及其面临的挑战具有重要意义。同时,它也为未来的研究提供了参考,指出如何改进现有算法以提高跟踪的稳定性和实时性。
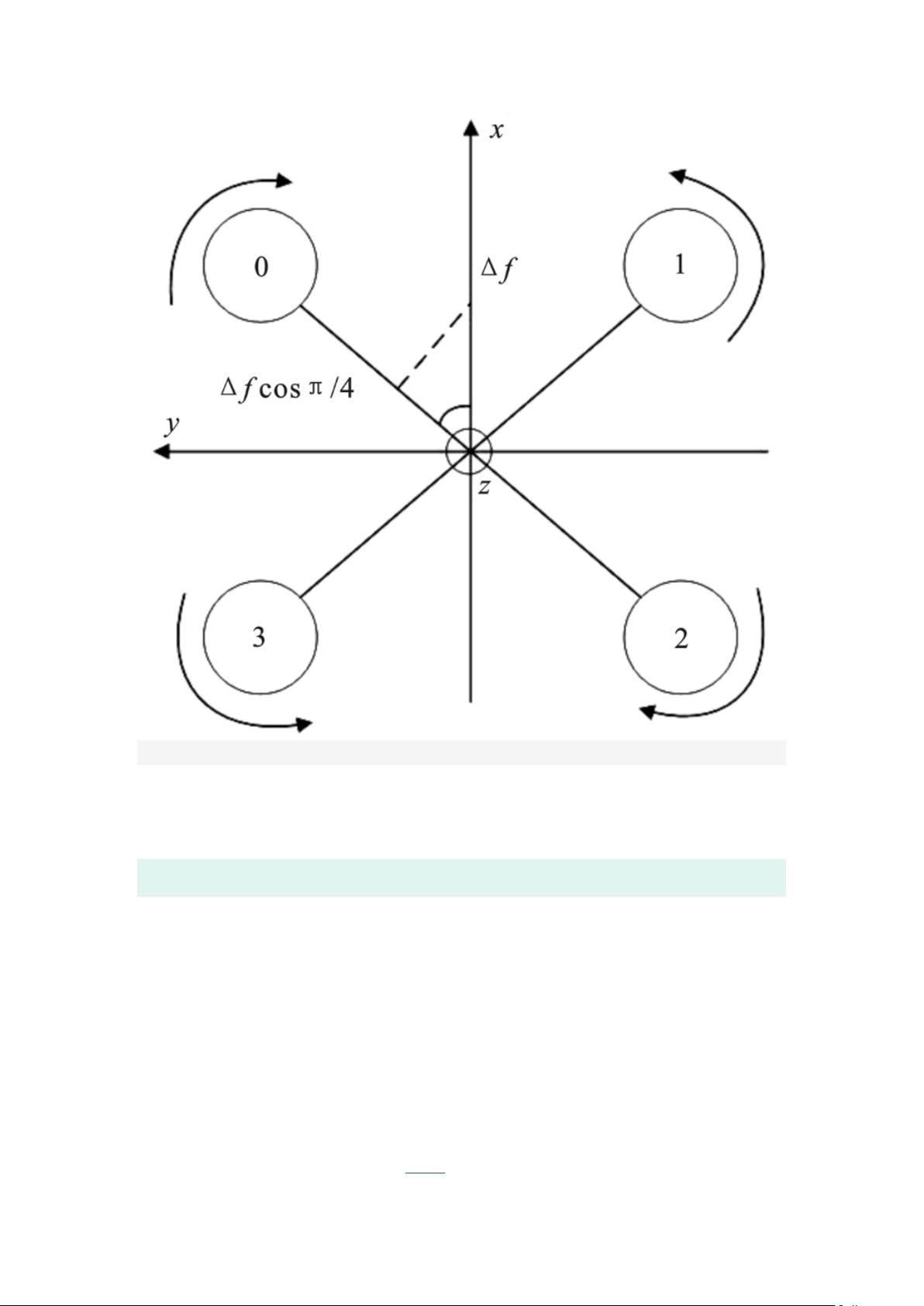
图 2 四轴飞行器拉力分解示意图
四轴飞行器螺旋桨的转速的变化可以改变螺旋桨的拉力,从而控制飞行器
执行前进、后退、向左、向右等飞行动作。
2 基 于特 洛平台 的目 标检测与跟 踪系 统设计与实 现
在进行目标检测与跟踪时,系统终端处理图片帧的实时性和飞行器控制的
稳定性是需要重点考虑的两个方面。在图片帧预处理阶段,传统方法对飞行器
传回的图片帧逐一处理,这样在准确性上确实效果较佳,但消耗大量时间。针对
飞行器实时性要远大于准确性的要求,文中提出一种基于注意力模型的图片帧
预处理方法,选出对目标跟踪处理贡献度较高的部分帧,配合基于像素点的反馈
控制算法,旨在提高飞行器目标检测与跟踪系统的实时性和飞行器控制的稳定
性。
目标检测与跟踪系统结构如图 3 所示,系统运行流程设计如下:
剩余18页未读,继续阅读
109 浏览量
点击了解资源详情
200 浏览量
2024-09-23 上传
2023-02-23 上传
2023-10-18 上传
2021-09-14 上传

罗伯特之技术屋
- 粉丝: 4509
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- excel制表的技巧
- spring开发指南
- ARES User Guide
- IBM Redbook -WebSphere Studio 5.1.2 for JSF and SDO
- winsock编程实例
- Flash开发媒体应用程序.pdf
- 转TD使用手册——实用实例
- ISIS User Guide
- 计算机图形学实验程序
- 最新scsi ultra320协议
- aspnet MVC应用程序实例
- IBM DB2 - SQL Reference for Cross-Platform Development
- How to Write Better Test Cases
- Java langugae Specification 3.0
- JAVA认证-310-055
- iometer使用指南
