视觉引导技术详解:旋转中心算法在机器人应用中的实践
下载需积分: 2 | PPTX格式 | 2.12MB |
更新于2024-07-09
| 18 浏览量 | 举报
本文主要探讨了视觉引导类应用在机器人领域的应用,特别是涉及单相机和多相机引导装配的策略,以及详细的旋转中心算法。作者Edward Zhu在2017年9月2日分享了这些技术要点,强调了可靠性、准确性和效率。
在视觉引导的应用中,主要有以下几种方法:
1. **StdxStdy方法**:适用于取料前调整姿态的场景。相机可以固定安装,也可以安装在机器人上,通常先拍照再进行取料操作。
2. **旋转中心法**:这种方法适合相机固定安装的情况,先取料后拍照。在处理放料位置有角度或旋转中心远离相机视野中心的情况时需特别注意。
3. **工件坐标系法**:这种方法适用于多相机多工位引导装配,通常由单相机拍摄单个物料,取料后再次拍照。执行机构可能是机器人或自建的X/Y/T轴系统。
在使用 Alignplus 的情况下,可以提高定位精度。若不使用 Alignplus,可以考虑使用Mylar片作为辅助工具,但这也取决于具体的应用场景。
对于双相机或多相机引导对位贴合,执行机构通常是运动控制平台,使用 Alignplus 可以提高对位精度。如果不使用 Alignplus,可以根据是否能使用Mylar片采取不同的定位引导方法。
对于单只相机引导机器人或X,Y,Theta运动控制机构的情况,分为两种情况:
- 相机固定安装,或安装在机器人上。先拍照,执行机构根据位置调整抓取姿态,确保物料相对于治具姿态固定,可以直接放置。
- 相机固定,机器人或运动控制机构移动到固定点取料。取料后在相机下拍照,调整放置姿态以实现对位。
**非线性标定** 是视觉引导中的关键步骤,尤其是当单相机的视场角大于20mm或系统精度要求较高时。标定目的是建立Camera2D与Robot2D或Home2D之间的坐标轴关系,并计算位置平移。实物标定(如使用棋盘格)和尖锥扎点是两种常见的标定方式,至少需要4个点进行标定。实物标定通常比尖锥扎点提供更高的精度。
标定过程包括:
- 相机固定安装,从上往下拍,可以在治具上设置目标物,如带有圆孔的铁片,或者让机器人吸取产品并移动至9个不同位置。
- 相机固定安装,从下往上拍,直接吸取产品拍照。
- 相机装在机器人上,产品不动,机器人带着相机移动至9个位置拍照,然后通过图像处理确定9点位置,反向计算坐标轴方向。
这些技术为机器人引导提供了精确的视觉参考,确保了在各种应用场景中的高效和准确操作。
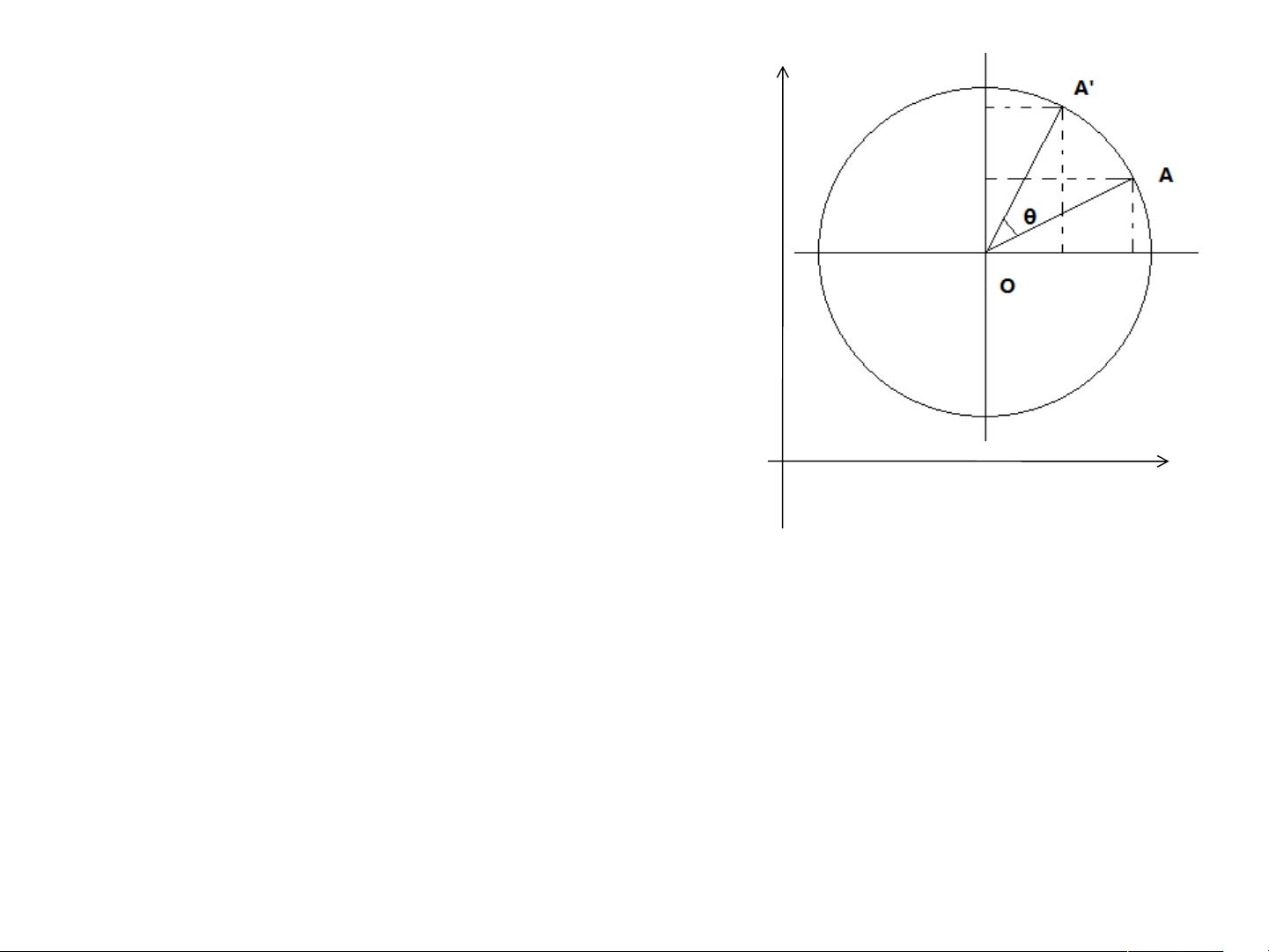
旋转中心计算公式
A ( X,Y )点绕 任意点 旋转 θ 后的坐标。
X’ – Xo = cos θ * (X-Xo) – sin θ *(Y-Yo) ;
Y’ – Yo = cos θ* (Y-Yo) + sin θ* (X-Yo);
X: 旋转前的特征物的平台坐标。
X’: 一次对位旋转后特征物的平台坐标
Xo’: 为固定值,事先可以校正。
Y 、 Y’ 同理。
X’ = cos θ * (X-Xo) – sin θ *(Y-Yo) + Xo;
Y’ = cos θ* (Y-Yo) + sin θ* (X-Xo) + Yo;
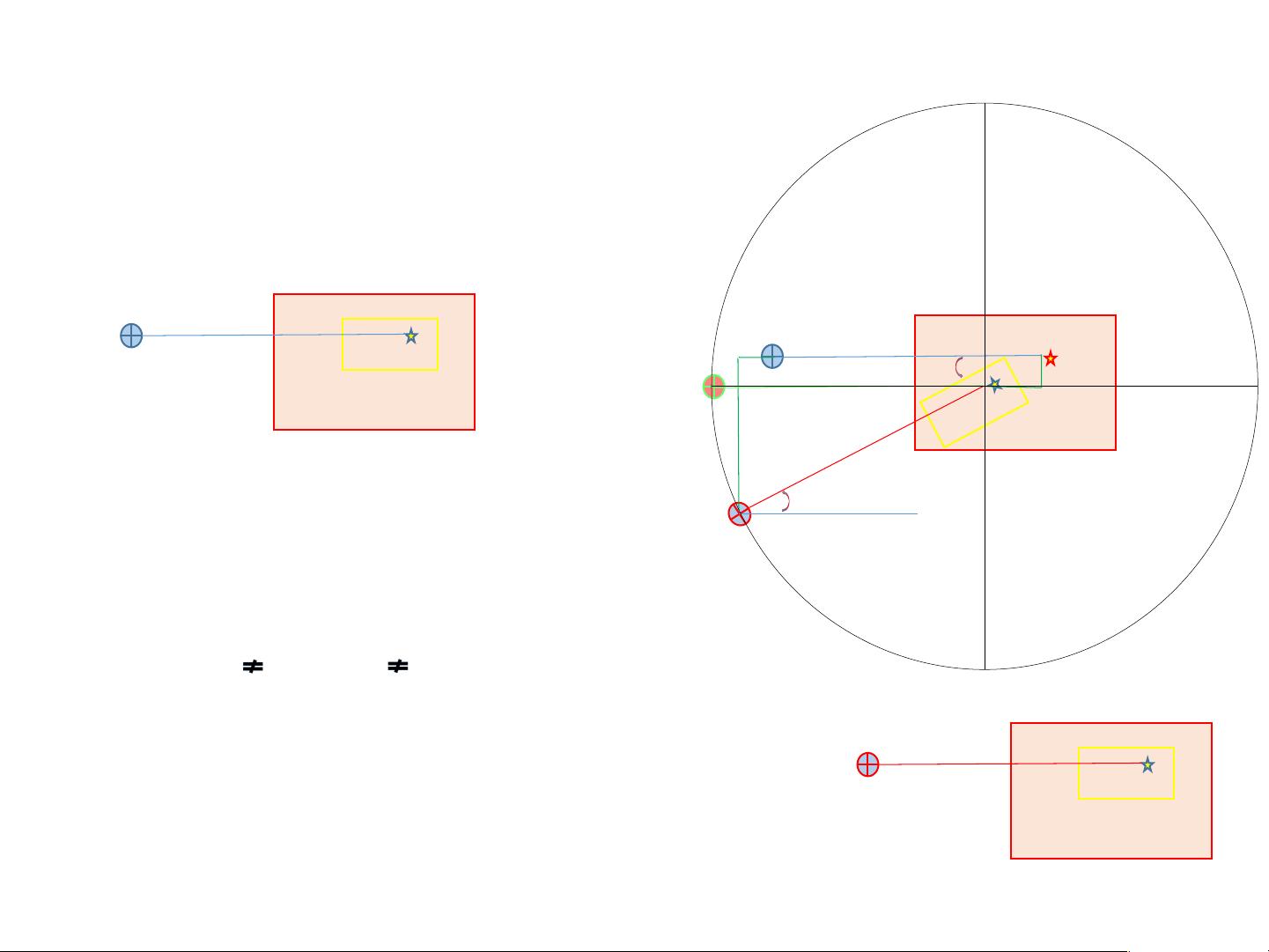
注释:此领域如果运用到机械手或者平台在固定的姿态 ( 盲抓 ) 下旋
转时,旋转轴的旋转中心是永远不变的。旋转轴的旋转中心 Xo’ 计算
方法是: 旋转轴旋转 180° , X/2 、 Y/2. 经过多点标定后进行代入公
式计算,但是很多场景不允许转 180 度。
平台 X 轴
平台 Y 轴
(Xo ,Y
o)
(X’,
Y’)
(X , Y)
剩余47页未读,继续阅读
相关推荐





坚、、
- 粉丝: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 初学者入门必备!Visual C++开发的连连看小程序
- C#实现SqlServer分页存储过程示例分析
- 西门子工业网络通信例程解读与实践
- JavaScript实现表格变色与选中效果指南
- MVP与Retrofit2.0相结合的登录示例教程
- MFC实现透明泡泡效果与文件操作教程
- 探索Delphi ERP框架的核心功能与应用案例
- 爱尔兰COVID-19案例数据分析与可视化
- 提升效率的三维石头制作插件
- 人脸C++识别系统实现:源码与测试包
- MishMash Hackathon:Python编程马拉松盛事
- JavaScript Switch语句练习指南:简洁注释详解
- C语言实现的通讯录管理系统设计教程
- ASP.net实现用户登录注册功能模块详解
- 吉时利2000数据读取与分析教程
- 钻石画软件:从设计到生产的高效解决方案
