滑模控制与观测器设计详解:案例丰富的教材
需积分: 16 48 浏览量
更新于2024-07-18
1
收藏 8.42MB PDF 举报
《滑模控制与观测:理论与实践》是一本深入探讨滑模控制(Sliding Mode Control, SMC)及其观测器设计的重要教材,由业内权威专家共同编撰,包括Yuri Shtessel、Christopher Edwards、Leonid Fridman、Arie Levant等人。该书聚焦于自动化领域的控制工程,着重介绍滑模控制这一动态控制策略,其特点是能够有效地处理非线性系统中的不确定性、快速切换和鲁棒性。
书中首先阐述了滑模控制器的设计方法,强调了如何通过设计特定的控制律,使系统的状态能够在有限的时间内进入一个稳定的“滑动区域”,从而实现对系统性能的精确控制。滑模控制因其在诸如定位、伺服系统、电力电子等领域广泛应用而备受关注,它能够应对系统参数变化和外部干扰,保持系统的稳定性和快速响应能力。
观测器的设计部分则是为了实现系统的状态估计,即使在没有完全信息的情况下也能保证控制的准确性。这部分内容讲解了如何构建有效的观测器模型,确保系统的可观测性,并讨论了与滑模控制相结合时可能出现的挑战,如观测器的稳定性、抗噪声性能以及与控制器的协同作用。
作者们来自全球知名学府,如美国马里兰大学、墨西哥国家自治大学等,他们的深厚学术背景使得本书理论严谨,案例丰富,适合研究生和工程师作为学习参考资料。此外,书后还提供了系列链接,读者可以进一步探索滑模控制的更多研究进展和后续出版物。
《滑模控制与观测》是一本全面且实用的教材,涵盖了滑模控制的基础理论、设计原则、实际应用以及前沿发展,对于希望深入了解滑模控制技术的读者来说,无论是理论研究者还是工程实践者,都是一份不可或缺的学习资料。

Contents xv
4.7 Variable-Gain Super-Twisting Control ............................... 170
4.7.1 Problem Statement ........................................... 171
4.7.2 The Variable-Gain Super-Twisting Algorithm.............. 172
4.8 Case Study: The Mass–Spring–Damper System ..................... 176
4.8.1 Model Description ........................................... 176
4.8.2 Problem Statement ........................................... 177
4.8.3 Control Design ............................................... 178
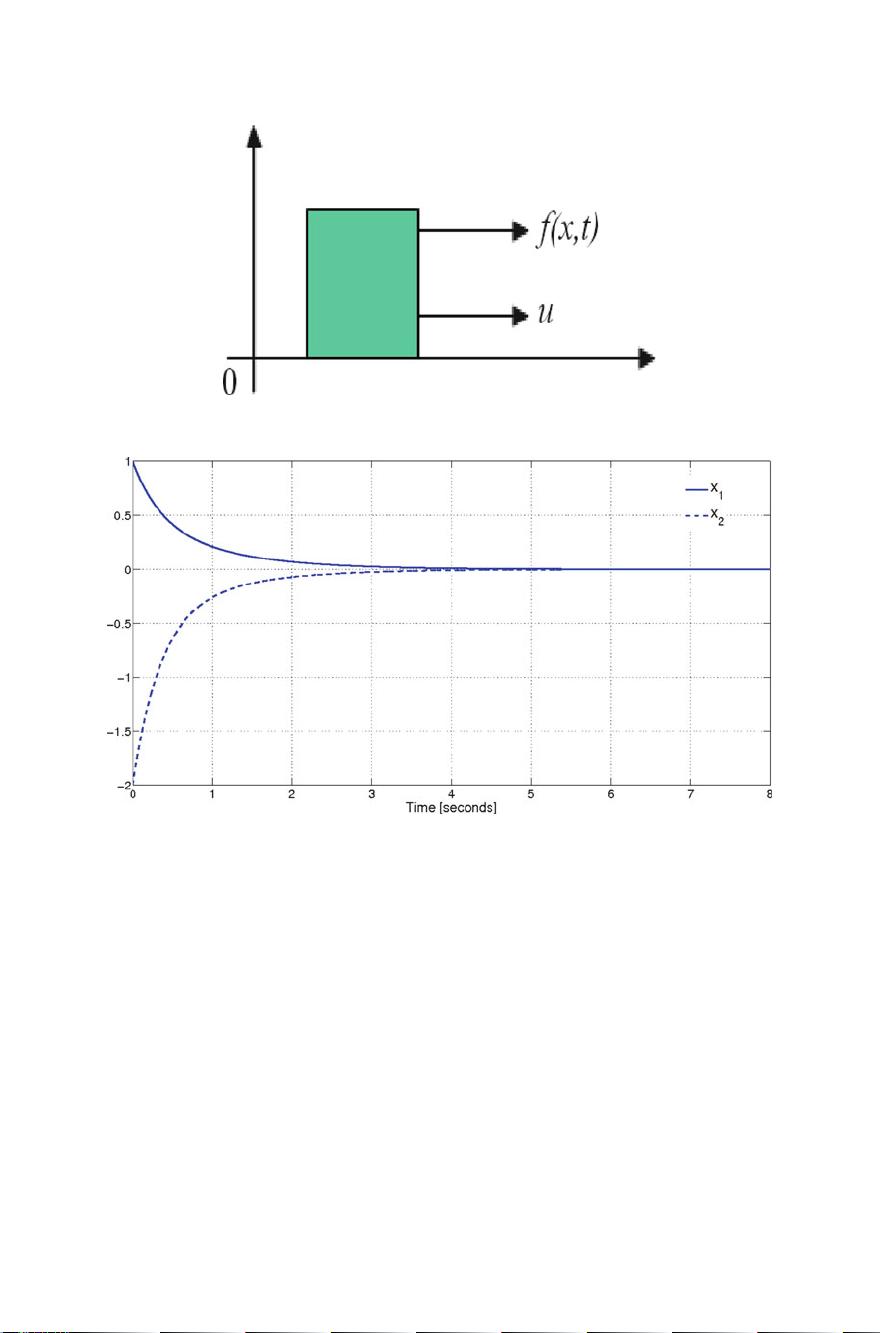
4.8.4 Experimental Results ........................................ 179
4.9 Notes and References.................................................. 179
4.10 Exercises ............................................................... 182
5 Analysis of Sliding Mode Controllers in the Frequency Domain ....... 183
5.1 Introduction ............................................................ 183
5.2 Conventional SMC Algorithm: DF Analysis ......................... 184
5.3 Twisting Algorithm: DF Analysis .................................... 193
5.4 Super-Twisting Algorithm: DF Analysis ............................ 196
5.4.1 DF of Super-Twisting Algorithm............................ 196
5.4.2 Existence of the Periodic Solutions ........................ 198
5.4.3 Stability of Periodic Solution ............................... 200
5.5 Prescribed Convergence Control Law: DF Analysis ................ 201
5.6 Suboptimal Algorithm: DF Analysis ................................. 203
5.7 Comparisons of 2-Sliding Mode Control Algorithms ............... 205
5.8 Notes and References.................................................. 208
5.9 Exercises ............................................................... 208
6 Higher-Order Sliding Mode Controllers and Differentiators ........... 213
6.1 Introduction ............................................................ 214
6.2 Single-Input Single-Output Regulation Problem..................... 216
6.3 Homogeneity, Finite-Time Stability, and Accuracy .................. 217
6.4 Homogeneous Sliding Modes ......................................... 222
6.5 Accuracy of Homogeneous 2-Sliding Modes ........................ 223
6.6 Arbitrary-Order Sliding Mode Controllers ........................... 225
6.6.1 Nested Sliding Controllers .................................. 225
6.6.2 Quasi-continuous Sliding Controllers....................... 227
6.7 Arbitrary-Order Robust Exact Differentiation ....................... 228
6.8 Output-Feedback Control ............................................. 230
6.9 Tuning of the Controllers.............................................. 233
6.9.1 Control Magnitude Tuning .................................. 233
6.9.2 Parametric Tuning............................................ 233
6.10 Case Study: Car Steering Control..................................... 234
6.11 Case Study: Blood Glucose Regulation .............................. 237
6.11.1 Introduction to Diabetes ..................................... 237
6.11.2 Insulin–Glucose Regulation Dynamical Model ............ 240
6.11.3 Higher-Order Sliding Mode Controller Design............. 241
6.11.4 Simulation .................................................... 244


剩余368页未读,继续阅读
2021-05-03 上传
2021-08-05 上传
2021-08-05 上传
2021-08-05 上传
2021-08-05 上传
2021-08-05 上传

黎明雨水
- 粉丝: 0
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- 达梦数据库DM8手册大全:安装、管理与优化指南
- Python Matplotlib库文件发布:适用于macOS的最新版本
- QPixmap小demo教程:图片处理功能实现
- YOLOv8与深度学习在玉米叶病识别中的应用笔记
- 扫码购物商城小程序源码设计与应用
- 划词小窗搜索插件:个性化搜索引擎与快速启动
- C#语言结合OpenVINO实现YOLO模型部署及同步推理
- AutoTorch最新包文件下载指南
- 小程序源码‘有调’功能实现与设计课程作品解析
- Redis 7.2.3离线安装包快速指南
- AutoTorch-0.0.2b版本安装教程与文件概述
- 蚁群算法在MATLAB上的实现与应用
- Quicker Connector: 浏览器自动化插件升级指南
- 京东白条小程序源码解析与实践
- JAVA公交搜索系统:前端到后端的完整解决方案
- C语言实现50行代码爱心电子相册教程
