华为HCIP-WLAN-CEWA(H12-321)认证:负载均衡、全向天线与准入模型详解
版权申诉
本资源文档主要聚焦于华为认证HCIP-WLAN-CEWA(H12-321)的知识点。该文档包含了关于华为企业级无线网络管理的多个基础和技术性问题,适合准备参加该认证考试的学习者参考。
1. **负载均衡功能**:
- 在无线网络设计中,负载均衡功能允许AP独立于AC工作,但前提是无线终端必须能够扫描并关联到参与负载均衡的AP。这涉及到了分布式网络架构的概念,AP间的无线通信能力以及客户端漫游策略。
2. **全向天线特性**:
- 全向天线的特点是信号分布均匀,覆盖360度,但并不意味着能量高度集中或方向性强。因此,选项C“全向天线的波瓣宽度为垂直360度”是错误的。
3. **AgileController准入模型**:
- AgileController的准入模型强调基于特定授权条件(如802.1x或Portal认证)对用户进行访问控制,授权条件包括授权元素,例如用户的身份、位置等,选项ABD描述了准入模型的关键组成部分。
4. **WLAN AP组配置**:
- 正确的配置示例涉及到使用Mesh Profile、Regulatory Domain Profile、Wired Port Profile等多个层次的设置,其中正确引用有线口模板(如wired-portgigabitEthernet0)是在AP组中应用有线端口配置。
5. **用户身份数据系统支持**:
- AgileController支持多种用户身份管理系统,包括普通账号创建、第三方认证系统以及数字证书,选项ABC涵盖了这些认证方式。
6. **目录服务器DN参数**:
- DN(Distinguished Name)是每个对象在目录服务中的唯一标识符,不仅是LDAP服务器( Lightweight Directory Access Protocol),其他类型的目录服务也可能使用DN,所以选项A表述正确。
以上知识点涵盖了无线网络配置、天线技术、准入控制、AP组配置和认证系统等多个方面的内容,对于理解华为的企业级无线网络管理和认证流程至关重要。通过深入学习和实践这些概念,考生可以提升HCIP-WLAN-CEWA(H12-321)认证考试的能力。
A. Flood攻击
B. Spoof攻击
C. Weak IV攻击
D. 暴力破解
Correct Answer: ABCD
Section: (none)
QUESTION 47
关于Mesh网络中的MPP,以下描述正确的是?
A. 连接无线Mesh网络和其他类型的网络,并与Mesh网络内部MP/MAP节点进行通信
B. MPP节点具有Portal功能,通过MPP节点,Mesh内部的节点可以和外部网络通信
C. MPP节点也可以称作为Mesh网关
D. MPP节点不支持冗余
Correct Answer: ABC
Section: (none)
QUESTION 48
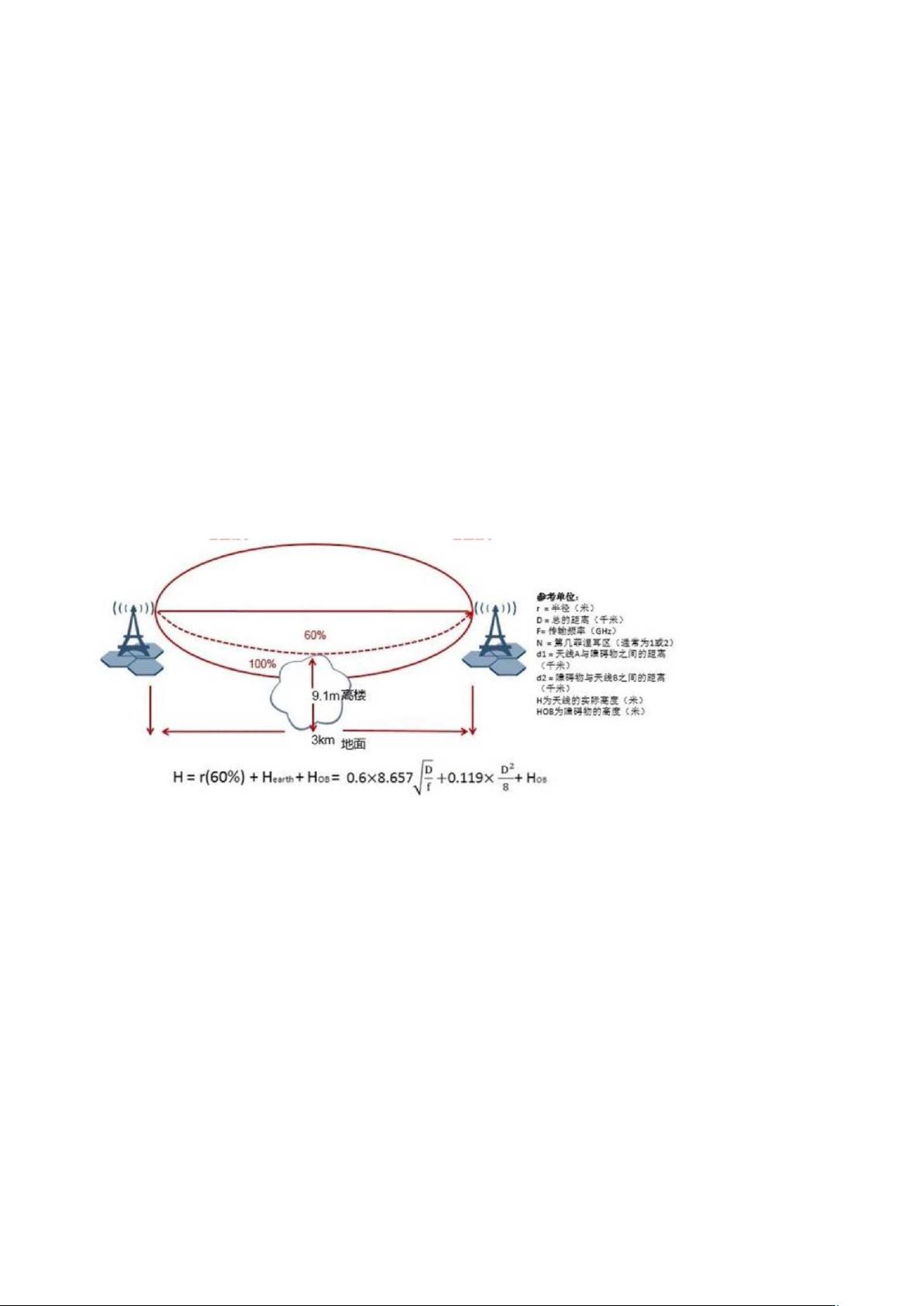
如图所示,一条长度为3km的点对点链路,链路中点处有一栋距离地面高9.1m的办公楼,若信号传输频率
为5.8GHz,根据实际情况请参考以下公式,求收发天线距离地面最小的安装高度是多少?
A. 9.1m
B. 10m
C. 13m
D. 18m
Correct Answer: C
Section: (none)
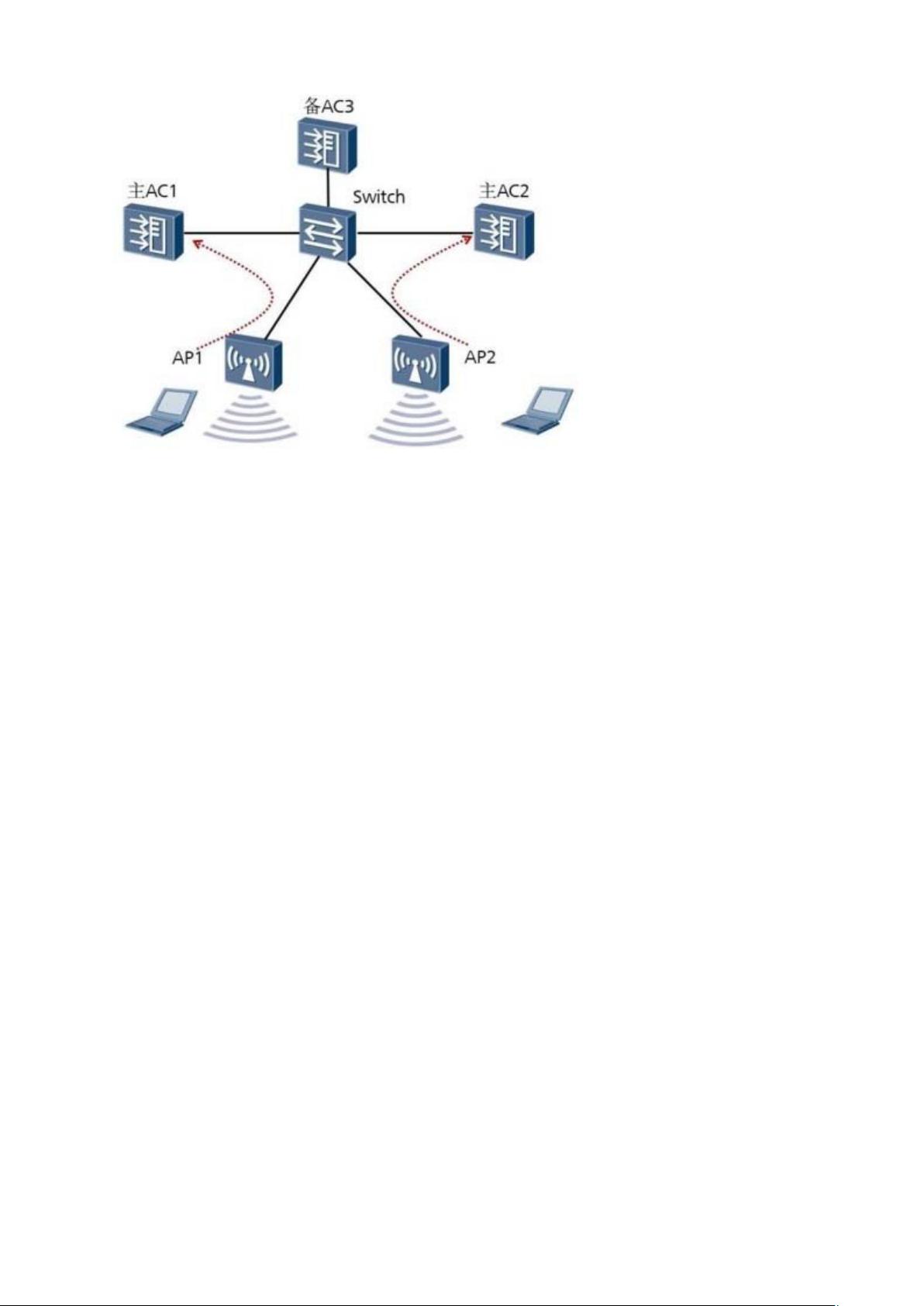
QUESTION 49
如图所示,关于N+1备份组网,以下描述正确的是?

剩余70页未读,继续阅读
2020-03-19 上传
2022-10-21 上传
点击了解资源详情
点击了解资源详情
2021-10-20 上传

资料库01
- 粉丝: 437
- 资源: 2642
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入浅出:自定义 Grunt 任务的实践指南
- 网络物理突变工具的多点路径规划实现与分析
- multifeed: 实现多作者间的超核心共享与同步技术
- C++商品交易系统实习项目详细要求
- macOS系统Python模块whl包安装教程
- 掌握fullstackJS:构建React框架与快速开发应用
- React-Purify: 实现React组件纯净方法的工具介绍
- deck.js:构建现代HTML演示的JavaScript库
- nunn:现代C++17实现的机器学习库开源项目
- Python安装包 Acquisition-4.12-cp35-cp35m-win_amd64.whl.zip 使用说明
- Amaranthus-tuberculatus基因组分析脚本集
- Ubuntu 12.04下Realtek RTL8821AE驱动的向后移植指南
- 掌握Jest环境下的最新jsdom功能
- CAGI Toolkit:开源Asterisk PBX的AGI应用开发
- MyDropDemo: 体验QGraphicsView的拖放功能
- 远程FPGA平台上的Quartus II17.1 LCD色块闪烁现象解析
