Matlab基础与模糊逻辑控制器设计
版权申诉
55 浏览量
更新于2024-07-02
收藏 802KB DOC 举报
"Matlab基本认识,模糊逻辑控制器设计"
在MATLAB中,模糊逻辑控制器(Fuzzy Logic Controller, FLC)是一种基于模糊集合理论的控制策略,它允许非精确和不确定信息的处理。该文档主要介绍了如何在MATLAB环境中设计模糊逻辑控制器,特别是Fuzzy PD-type和Fuzzy PI-type控制器。
首先,设计模糊逻辑控制器的关键步骤包括选择输入和输出变量以及定义它们的范围。在示例中,输入信号通常包含误差e[k](即目标值r[k]与实际输出y[k]之间的差异)和误差差分量de[k](误差的变化率)。输出变量可以是u[k]或du[k],决定了控制器的类型。当输出是u[k]时,称为Fuzzy PD-type FLC,因为它包含比例(P)和微分(D)作用。如果输出是du[k],则控制器具有积分效果,类似于Fuzzy PI-type FLC。
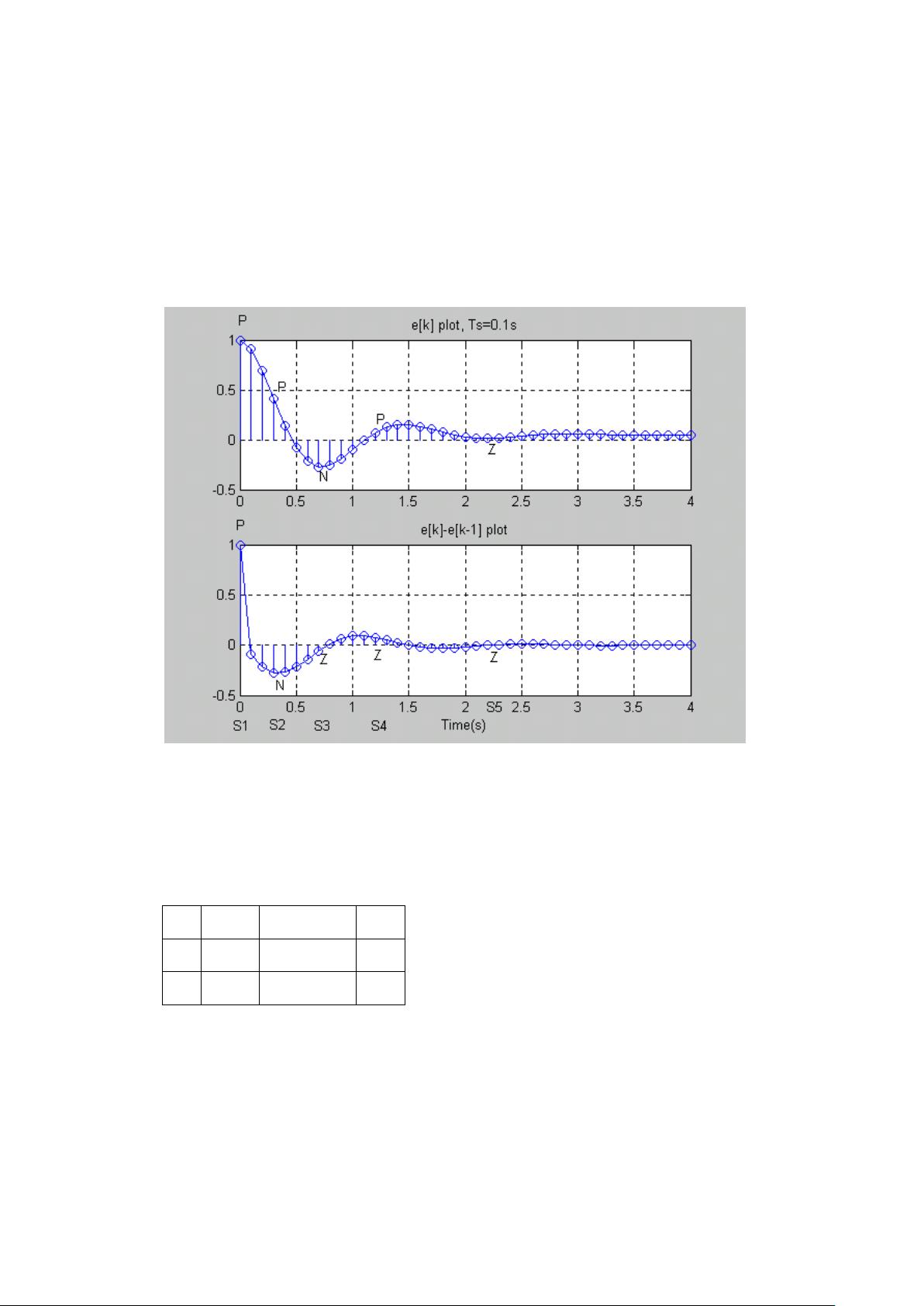
在设计过程中,确定采样时间(Sampling time, Ts)至关重要,例如Ts=0.1秒,这决定了系统如何处理连续时间信号的离散表示。通过分析输入输出反应图和误差信号e[k]及de[k]的行为,可以更好地理解系统的动态特性。文档中提供了两个例子:一是针对一阶系统的控制,二是针对二阶系统的控制。每个例子都有对应的方块图、输入输出反应图以及误差信号的反应图。
对于一阶系统,误差e[k]和误差差分量de[k]的反应图显示了简单的指数增长行为。而二阶系统则展示了超调和欠阻尼现象,de[k]的计算方法不同,导致了初始值的变化。在设计模糊逻辑控制器时,需要根据这些反应图来定义模糊集的隶属函数,并制定相应的规则。
规则制定是模糊逻辑控制器的核心部分,它涉及到如何将输入变量映射到输出变量。规则通常基于领域专家的经验或系统的动态特性来制定。例如,可以设定如果e[k]较大且de[k]为正,则输出du[k]应增加,反之则减少。这些规则构成模糊逻辑控制器的基础,它们被转化为MATLAB的FIS(Fuzzy Inference System)和MDL文件,用于实现模糊推理和控制决策。
此外,文档还提到了使用Sugeno-style FLC和模糊神经网络控制的方法。Sugeno-style FLC是一种简化形式的模糊逻辑控制器,其输出是线性组合,简化了控制器的设计和实现。模糊神经网络结合了模糊逻辑的灵活性和神经网络的学习能力,可以适应更复杂的控制任务。
最后,模糊PID控制是模糊逻辑与传统PID控制理论的结合,通过模糊逻辑对比例、积分和微分参数进行模糊化处理,从而增强控制器的性能,特别是在处理非线性和不确定性问题时。
这份文档详细介绍了在MATLAB中设计和应用模糊逻辑控制器的基本概念和步骤,包括输入输出的选择、规则制定、模糊集分配、采样时间的确定,以及不同类型的模糊逻辑控制器(如Fuzzy PD-type和Fuzzy PI-type)。通过实例分析,读者可以深入理解如何利用MATLAB工具进行模糊逻辑控制系统的建模和仿真。

附錄 2 模糊邏輯控制器設計 附錄 2-7
圖 A2-5
在 S4 點,ek is P and dek is Z,這就是上述類推出的規則。
在 S5 點,ek is Z and dek is Z,。這時不要任何 du[k]故 du[k]=0。
把以上的規則整理如下:
N N N (from S1)
N Z N (from S3)
N P Z (from S2)
Z N N (ek 雖在零附近,但 error 往負走,故 uk=N)
Z Z Z (from S5)
Z P P
P N Z (from S2)
P Z P (from S3)
P P P (from S1)
剩余36页未读,继续阅读
2024-04-20 上传
106 浏览量
2022-07-05 上传
129 浏览量
2021-12-08 上传
2021-11-11 上传
2022-07-14 上传
2021-09-22 上传
2023-07-02 上传

omyligaga
- 粉丝: 97
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- playground-css:测试各种CSS素材和花式CSS样式
- 26位电平转换IDT74ALVC164245.zip
- Aprendiendo-Csharp
- 知识萃取与创新管理
- Dinosaurs-Project-Udacity
- MMM-MTA-LIRR:NY MTA长岛铁路信息的MagicMirror模块
- finalYearProject:库存网站
- 投资组合
- 知识管理的基础建材
- VehicleManagement:一个基于GO的车辆管理小程序后台~
- dynimg:易于扩展的延迟加载库
- cine-js
- valuedefi-docs
- Servlets-JavaEE_Examples
- 知识管理与商业智慧
- Soccer-3:您好,我非常高兴地宣布盛大的Soccer 3.0 beta1。此回购将包含整个Soccer 3系列。 感谢一些人的一些代码
