采样控制系统Simulink仿真详解:步骤与模型构建
需积分: 14 4 浏览量
更新于2024-09-08
收藏 167KB PDF 举报
本课件资料主要关注系统建模与Simulink仿真,特别是针对第5章的"采样控制系统仿真"。采样控制系统是一种将连续控制系统通过模拟采样过程转化为离散形式进行控制的设计方法。在数字仿真中,尽管采样控制系统具有独特的特性,但从建模角度来说,它本质上仍属于连续系统范畴。
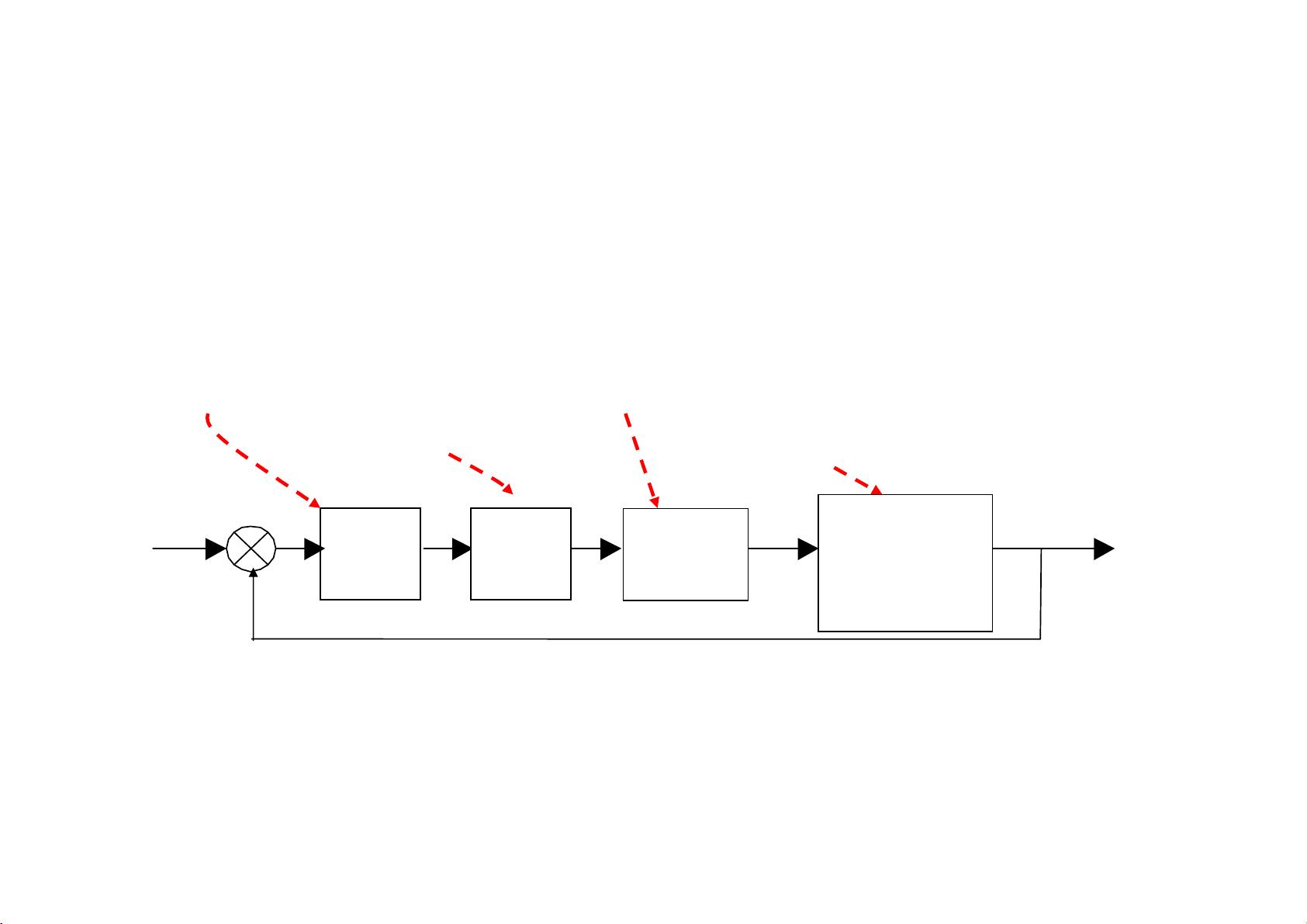
5.1章节详细介绍了采样控制系统的基本结构,包括采样开关(A/D转换器)、数模转换器或信号重构器、离散的数字控制器以及连续的被控对象或过程。系统通常由一个采样器和一个保持器构成,类似于离散系统,使得离散相似法成为仿真工具的一个有效手段。然而,采样控制系统的特点在于其采样周期、采样位置和保持器的实际存在,以及可能不同的仿真步距与实际采样周期的关系。
5.2部分着重于采样周期(Ts)与仿真步距(T)的讨论。采样周期决定了系统的实际行为,而仿真步距则是模拟过程中的时间间隔。有三种常见选择:一是采样周期等于仿真步距,适用于采样周期较小、系统阶次较低的情况;二是仿真步距小于采样周期,这可能导致仿真效率提升但需考虑误差;三是调整数字控制器的采样间隔,灵活性更高但可能影响系统的精确性。
模型构建时,如果采样周期等于仿真步距(T=Ts),则可以采用连续部分离散化的简化方法,即在连续部分的输入端加入采样器和信号重构器,避免在系统内部过多的虚拟采样操作。特别地,当H(s)为零阶信号重构器时,模型简化为G(z)的直接转换。
第5章的内容深入探讨了采样控制系统在Simulink仿真实现中的关键要素,包括模型构建策略和仿真参数选择,旨在帮助学生理解和掌握如何有效地利用Simulink工具进行这类系统的仿真分析。
第五章 采样控制系统仿真
从数字仿真的建模方法学角度来看,虽然采样控制系统有它自身的特点,但与连续系统没有本质
的区别,因而一般将其归类为连续系统仿真。
5.1 采样控制系统的基本结构
(1)采样开关或模数转换器; (2)数模转换器或信号重构器。
( 3)离散的数字控制器; (4)连续的被控对象或被控过程;
x(t)
+
-
y(t)
A/D
采样器
图 5.1 采样控制系统框图
数字
控制器
A/D(信号
重构器)
被控对象
与离散相似法所得到的系统进行比较,两者结构相近:被控对象连续,系统中均有采样器和保持器,
1
下载后可阅读完整内容,剩余9页未读,立即下载
2024-01-01 上传
2023-07-23 上传
2024-01-11 上传
2023-11-26 上传
2023-07-17 上传
2023-05-02 上传

普通网友
- 粉丝: 484
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- C语言快速排序算法的实现与应用
- KityFormula 编辑器压缩包功能解析
- 离线搭建Kubernetes 1.17.0集群教程与资源包分享
- Java毕业设计教学平台完整教程与源码
- 综合数据集汇总:浏览记录与市场研究分析
- STM32智能家居控制系统:创新设计与无线通讯
- 深入浅出C++20标准:四大新特性解析
- Real-ESRGAN: 开源项目提升图像超分辨率技术
- 植物大战僵尸杂交版v2.0.88:新元素新挑战
- 掌握数据分析核心模型,预测未来不是梦
- Android平台蓝牙HC-06/08模块数据交互技巧
- Python源码分享:计算100至200之间的所有素数
- 免费视频修复利器:Digital Video Repair
- Chrome浏览器新版本Adblock Plus插件发布
- GifSplitter:Linux下GIF转BMP的核心工具
- Vue.js开发教程:全面学习资源指南
