




提升假肢测试精准度:实时混合子结构仿真的机械臂选型
版权申诉
PDF格式 | 989KB |
更新于2025-03-20
| 8 浏览量 | 举报
知识点一:实时混合子结构(RTHS)方法
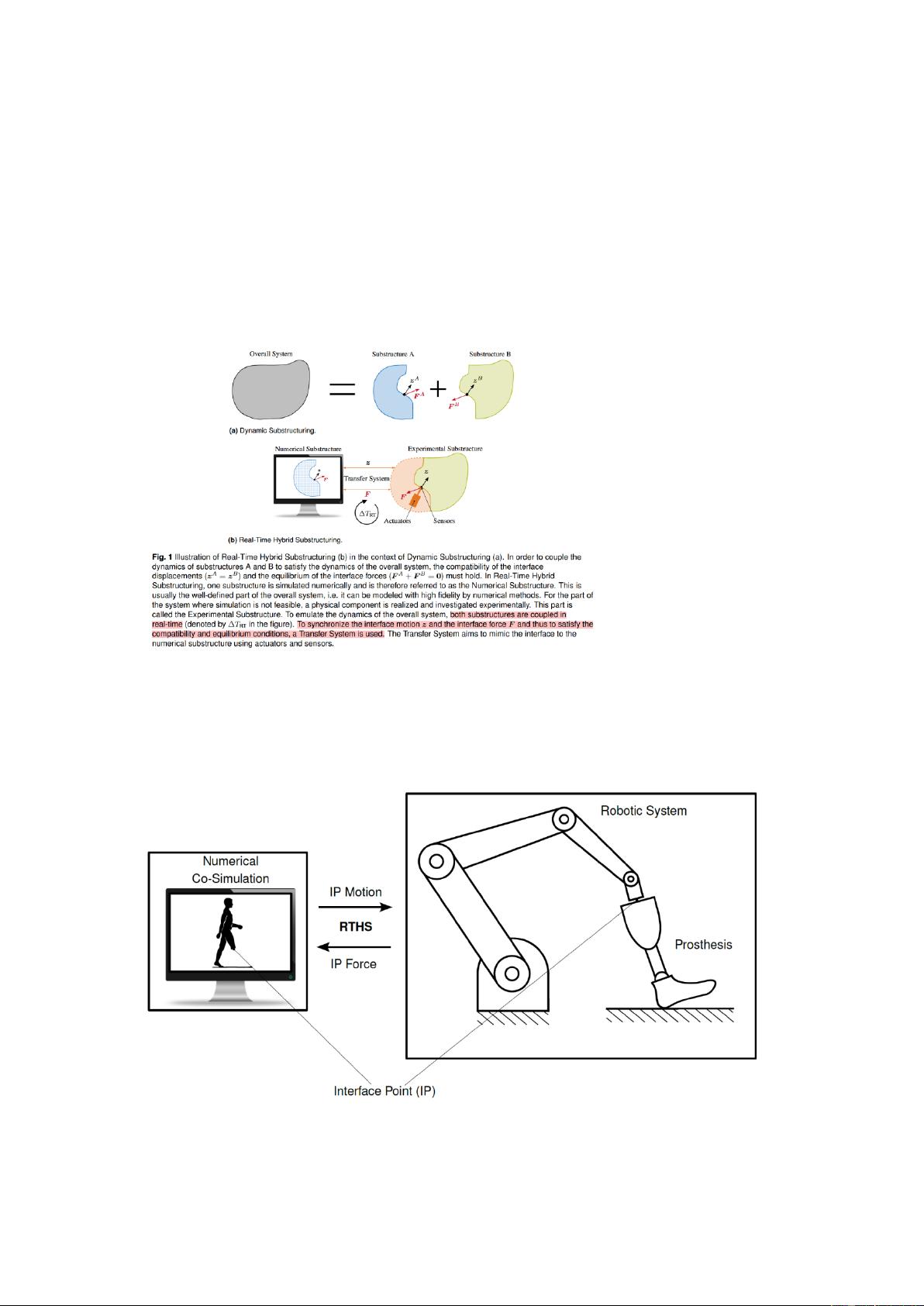
RTHS方法是一种将完整动态系统分解为数值部分和实验部分的仿真技术。数值部分通常通过仿真软件建模,比如Simulink,而实验部分则是真实存在的物理系统,例如机械臂和假肢。通过实时传输系统将这两部分耦合,RTHS能够在实验室内模拟并测试复杂系统的动态交互。这种方法尤其适用于假肢测试,因为它可以模拟截肢者和假肢之间的动态交互,提高测试的真实性和准确性。
知识点二:Simulink仿真平台
Simulink是MATLAB的一个附加产品,它提供了一个交互式图形环境和定制的函数库,用于模拟动态系统。在RTHS中,Simulink被用于建立和测试数值模型,这些模型代表了截肢者的模型,包括动力学和运动学等特性。Simulink允许研究者在不进行复杂编程的情况下,快速建立模型,修改参数,并实时观察系统响应,从而优化设计和控制策略。
知识点三:假肢动态性能测试
在假肢动态性能测试中,需要模拟截肢者使用假肢的真实步态。RTHS方法通过将假肢的动态行为与模拟截肢者模型相结合,以实现对假肢性能的动态测试。测试过程中,需要模拟不同的步态阶段,包括飞行阶段(即抬脚离地)和接触阶段(即脚触地)。在这些阶段,仿真系统需要准确地模拟力和位移的传递,以及假肢与地面的相互作用。
知识点四:机械臂在RTHS中的角色和要求
机械臂在RTHS中作为实验部分的主要组件,必须满足一系列关键要求,以确保仿真的准确性和可靠性。首先,机械臂必须能够执行接口运动,这涉及精确的位移和速度控制。其次,它需要能够承受并产生界面力,这对于测试假肢在接触地面时的力学特性至关重要。第三,低延迟高精度对于实时仿真系统是必须的,以确保机械臂的反应与模拟截肢者的动作同步。最后,机械臂应具备实时通信接口,以便与仿真平台(如Simulink)交换数据,实现无缝集成和控制。
知识点五:适合人群和应用场景
本文的内容特别适合生物力学、医疗器械、机器人技术等领域的专业人士和科研人员。这些领域内的研发机构或企业可以使用该技术对假肢进行动态性能测试,以优化假肢的设计,提高其功能性和人体适应性。通过结合RTHS方法和机械臂,可以在实验室环境下模拟真实的假肢使用条件,这有助于减少临床测试的风险和成本。
知识点六:研究和实验的实践注意事项
在进行实际的RTHS实验时,研究人员需要注意确保机械臂符合所提出的要求。在实际操作中,需要验证机械臂的性能是否满足执行接口运动、承受界面力、具有低延迟高精度和实时通信的能力。此外,还要保证传输系统的可靠性和准确性,确保数值部分和实验部分之间能够有效耦合。实验过程中的数据收集和分析也是重要环节,需要对收集到的数据进行仔细分析,以评估假肢性能和改进实验设计。
Background: Requirement Analysis for Robot-based Prosthesis(假肢) Testing
相关概念:
RTHS: Real time Hybrid Substructuring 实时混合子结构
RTHS 这种方法将一个完整的动态系统分为一个 numerical part(在 simulink 里建
模),和一个 experimental part(物理存在的)。 通过实时耦合将二者结合在一起进行
实验。
现在将假肢测试和 RTHS 方法结合:即截肢者模型(numerical part)在 Simulink 里建
模,然后机械臂和假肢(experimental part)都是真实存在的,通过一个 transfer system
将二者耦合起来。
下载后可阅读完整内容,剩余4页未读,立即下载
查看更多
相关推荐





pk_xz123456
- 粉丝: 3388
 我的内容管理
展开
我的内容管理
展开







最新资源
- PIC单片机编程实例精选集:13个编程案例解析
- 实现Winamp磁性吸附窗口效果的C#源码解析
- ASMack-19: Android端即时聊天工具源码解读
- Windows编程实践教程:一日一练
- C#版本控制实践:FirstGit压缩包解析
- MP9447电路设计:12V转5V原理图及PCB封装
- 会议室使用申请表Excel模板下载
- jQuery和Bootstrap4实现的倒计时计时器插件
- Java论坛源码开发教程及下载
- 自动桌面切换程序:提升多任务工作效率
- GitHub Python教程:基础代码实践与Git安装指南
- 使用Spring和Jersey实现高效文件下载功能
- Ubuntu下的Sublime Text 3编辑器:快速上手指南
- 开源安卓项目:寿星万年历sxwnl源码分享
- Putty v0.62:强大开源远程连接Linux/FreeBSD工具
- VSWarKey 1.0发布:一键无CD及回城新体验






















