数字粒子图像测速原理与系统理论详解
需积分: 10 59 浏览量
更新于2024-07-22
收藏 1.04MB PDF 举报
本文档深入探讨了数字粒子图像测速(Digital Particle Image Velocimetry, DPIV)的基本原理,主要依据于线性系统理论。PIV是一种利用高速相机捕捉含有悬浮粒子的流体流动图像,并通过图像处理技术来测量流体速度的方法。作者J.Westerweel在荷兰代尔夫特理工大学的航空与水力学实验室中提供了对这一技术核心概念的详细介绍。
文章首先阐述了PIV测量的基本原理,它将流场视为一个线性系统,通过分析两个或多个连续图像中的粒子位置变化,推算出流速分布。这种分析依赖于图像的互相关技术,即通过计算图像中像素间的相似度来识别和追踪粒子,从而确定它们的速度矢量。
文章详细讨论了PIV作为一种有效的测量方法所需的条件。这包括但不限于:粒子必须具有足够的对比度,以便在图像中清晰可辨;粒子的大小应足够小,以便在空间分辨率允许的范围内跟踪;以及流场中的粒子浓度不应过低,以确保足够的粒子对用于速度估计。此外,还需要考虑曝光时间、帧率、照明条件等因素,以避免运动模糊和光照不均的影响。
然而,尽管PIV有其优点,如非侵入性、无损测量和高空间分辨率,但实施过程中也存在局限性。这些局限性包括:图像噪声可能影响粒子追踪的准确性;大颗粒或复杂形状的粒子可能导致跟踪困难;以及在高速或大尺度流场中,可能会出现多普勒效应引起的误差。此外,计算复杂性随着数据量的增加而增加,特别是当处理高分辨率和长时间序列时,对计算机硬件和算法的要求较高。
文中还讨论了如何通过优化图像处理算法、引入多摄像头系统和采用先进的信号处理技术来克服这些限制,以提高测量精度和效率。最后,作者强调了理解和控制这些因素对于实现可靠和高质量PIV测量的重要性。
总结来说,这篇论文不仅介绍了数字粒子图像测速的基本原理和操作条件,还深入剖析了其在实际应用中可能遇到的问题及解决方案,对于从事流体力学研究、工业过程控制或光学测量领域的工程师和技术人员具有很高的参考价值。
J Westerweel
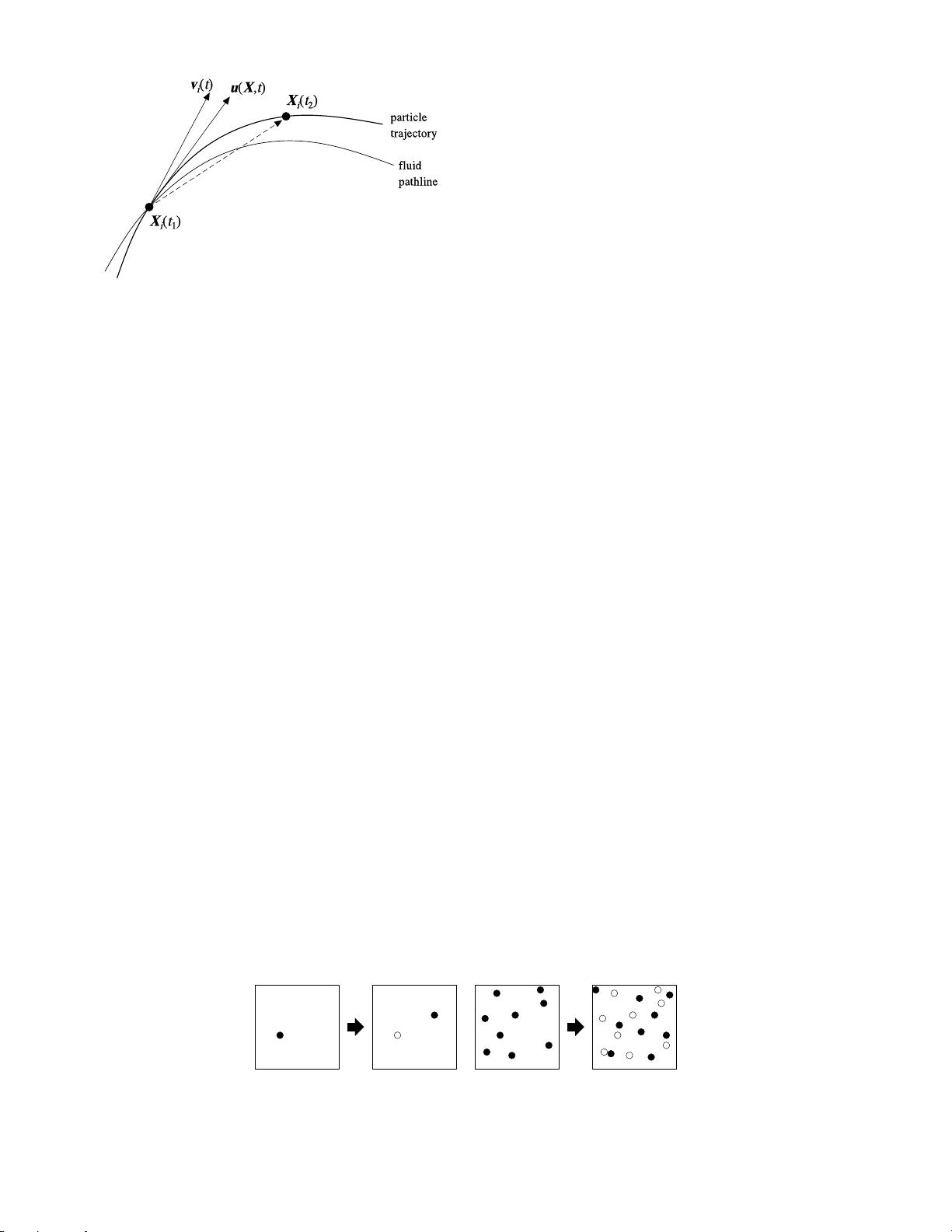
Figure 1. The displacement of the tracer particles is an
approximation of the fluid velocity (after Adrian 1995).
average velocity along the trajectory over a time 1t. This
is illustrated in figure 1.
Thus, D cannot lead to an exact representation of u,
but approximates it within a finite error ε:
kD − u · 1tk <ε. (2)
The associated error is often negligible, provided that the
spatial and temporal scales of the flow are large with respect
to the spatial resolution and the exposure time delay, and
the dynamics of the tracer particles. A further analysis of
these aspects is given by Adrian (1995).
The flow information is only obtained from the
locations at which the tracer particles are present.
Since these are distributed randomly over the flow, the
displacement of individual tracer particles constitutes a
random sampling of the displacement field, and different
realizations yield different estimates of D. Obviously,
these differences can be neglected as long as the
reconstructed displacement field satisfies equation (2). This
implies that the displacement field should be sampled
at a density that matches the smallest length scale of
the spatial variations in D. Since D can be regarded
as a low-pass filtered representation of u, with a cut-
off filter length that is equal to kDk, the displacement
field should be sampled with an average distance that is
smaller than the particle displacement. This implies that
a measurement in which the average distance between
distinct particle images is larger than the displacement
(as is the case in conventional particle tracking; see
figure 2(a)) cannot resolve the full displacement field.
However, when the seeding concentration is high (so that
the mean spacing between tracer particles is smaller than
the displacement) it is not possible to identify matching
particle pairs unambiguously; see figure 2(b). It is therefore
(a) individual tracer (b) tracer pattern
Figure 2. (a) At low seeding density individual tracers yield the fluid motion; (b) at high seeding density the tracers constitute
a pattern that is advected by the flow.
more convenient to describe the tracer particles in terms of
a pattern.
2.2. The tracer pattern
The tracer particles constitute a random pattern that is ‘tied’
to the fluid and the fluid motion is visible through changes
of the tracer pattern. The tracer pattern in X at time t is
defined as:
G(X,t) =
N
X
i=1
δ[X −X
i
(t)] (3)
where N is the total number of particles in the flow, δ(X) is
the Dirac δ-function and X
i
(t) the position vector of the
particle with index i at time t. Integration of G(X ,t) over
a volume yields the number of particles in that volume.
The tracer pattern at time t
0
can be viewed as a spatial
signal G
0
(X) = G(X,t
0
) at the input of a ‘black-box’
system (representing the flow) that acts on the input signal,
and returns a new signal G
00
(X) = G(X ,t
00
) at the output;
see figure 3. For ideal tracer particles the addition of a new
particle does not affect the action of the system on the other
tracer particles, i.e. the system is linear. Consequently, the
output signal can be written as a convolution of the input
signal with the impulse response H of the system:
G
00
(X) =
Z
H(X,X
0
)G
0
(X
0
) dX
0
. (4)
The impulse response is a shift of the input by the local
displacement D in equation (1):
H(X
0
,X
00
) = δ[X
00
− X
0
− D]. (5)
The shift formally depends on X, but under equation (2) it
can be assumed that D is locally uniform, so that H can be
regarded as shift invariant, i.e. H(X
0
,X
00
) = H(X
00
−X
0
).
According to linear system theory, the impulse response
of a black-box system can be obtained from the cross-
covariance R
G
0
G
00
of a random input signal with the
corresponding output signal:
R
G
0
G
00
(s) = H ∗ R
G
0
(s) (6)
(Priestley 1992), where ∗ denotes a convolution integral,
and R
G
0
is the auto-covariance of the input signal. For the
special case where the input signal is a homogeneous white
process (i.e. R
G
0
(s) ∝ δ(s)), the cross-correlation directly
yields the impulse response.
1380
剩余14页未读,继续阅读
2023-11-24 上传
2023-09-28 上传
2023-06-28 上传
2023-08-01 上传
2023-09-14 上传
2023-10-16 上传
2023-09-19 上传

lepetit0626
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 磁性吸附笔筒设计创新,行业文档精选
- Java Swing实现的俄罗斯方块游戏代码分享
- 骨折生长的二维与三维模型比较分析
- 水彩花卉与羽毛无缝背景矢量素材
- 设计一种高效的袋料分离装置
- 探索4.20图包.zip的奥秘
- RabbitMQ 3.7.x延时消息交换插件安装与操作指南
- 解决NLTK下载停用词失败的问题
- 多系统平台的并行处理技术研究
- Jekyll项目实战:网页设计作业的入门练习
- discord.js v13按钮分页包实现教程与应用
- SpringBoot与Uniapp结合开发短视频APP实战教程
- Tensorflow学习笔记深度解析:人工智能实践指南
- 无服务器部署管理器:防止错误部署AWS帐户
- 医疗图标矢量素材合集:扁平风格16图标(PNG/EPS/PSD)
- 人工智能基础课程汇报PPT模板下载
