RT-Thread CAN驱动开发详解
下载需积分: 0 | PDF格式 | 1.12MB |
更新于2024-06-30
| 132 浏览量 | 举报
本文主要介绍了如何在RT-Thread操作系统上编写和应用CAN(Controller Area Network)驱动,重点关注了CAN总线的基本概念、帧格式以及RT-Thread中的CAN驱动实现细节。
一、CAN总线的帧格式介绍
CAN总线是一种多主站通信协议,其帧格式包括标准帧和扩展帧两种。标准帧使用11位标识符(ID),扩展帧则使用29位标识符。每个CAN帧由起始位、仲裁域、控制域、数据域和校验和等部分组成,用于在设备间传输数据,并具有优先级机制,标识符越小,优先级越高。
二、RT-Thread上的CAN驱动编写
在RT-Thread中,为了支持CAN设备,需要定义一个新的设备类型RT_Device_Class_CAN,并实现一系列设备操作接口:
1. `rt_can_init`:初始化CAN设备,配置波特率、滤波器等参数。
2. `rt_can_open` 和 `rt_can_close`:分别用于打开和关闭CAN设备。
3. `rt_can_read` 和 `rt_can_write`:读写CAN帧,是驱动的核心部分,需要处理数据的接收和发送。
4. `rt_can_control`:进行设备控制操作,如设置工作模式、滤波器等。
5. `rt_can_rx_indicate` 和 `rt_can_tx_complete`:回调函数,用于处理接收数据的通知和发送完成的确认。
此外,文章提到了两个特定的数据结构:`struct stm32_can_device` 和 `struct stm32_can_int_rx/tx`。`stm32_can_device` 结构体包含了CAN控制器的指针以及接收和发送缓冲区的结构体指针。接收和发送缓冲区结构体 (`stm32_can_int_rx/tx`) 包含了实际的数据缓冲区和索引,用于存储接收到的CAN消息和待发送的CAN消息。
三、CAN数据处理线程编写
为了实现CAN数据的实时处理,通常会创建一个单独的数据处理线程,负责从接收缓冲区中取出数据并进行相应的业务处理,同时将需要发送的数据放入发送缓冲区,由驱动负责发送。
总结,RT-Thread上的CAN驱动实现了CAN通信的基本功能,允许用户通过标准的操作接口与CAN总线进行交互,提供了高效可靠的实时通信能力。在STM32微控制器上,结合其硬件CAN模块,可以构建强大的嵌入式系统,广泛应用于汽车电子、工业自动化、楼宇自动化等领域。
1
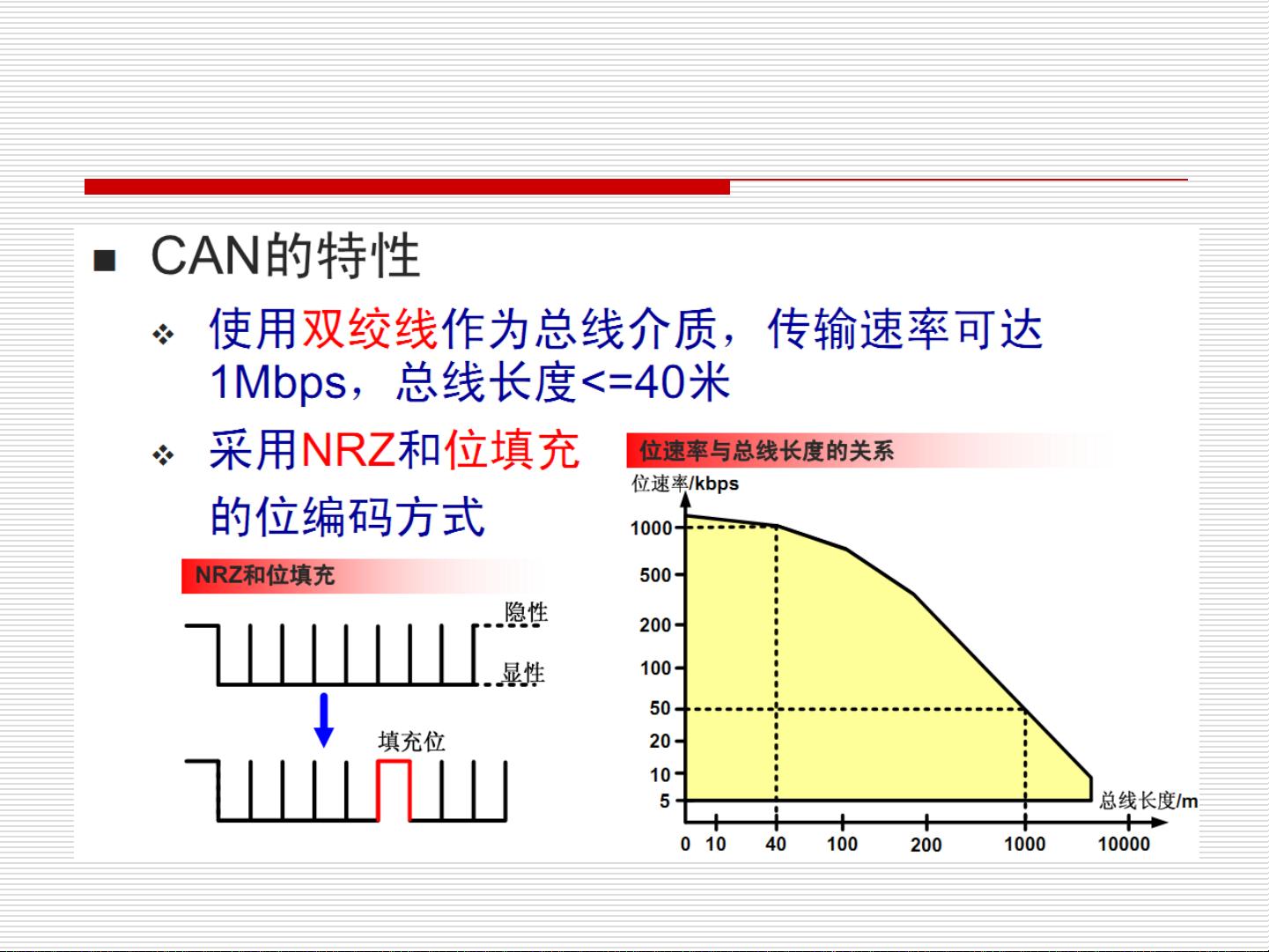
CAN总线的介绍
剩余21页未读,继续阅读
相关推荐





艾斯·歪
- 粉丝: 42
- 资源: 342
 我的内容管理
展开
我的内容管理
展开







最新资源
- ttysgym
- Design_Patterns
- 蓝桥杯嵌入式练习题——“电子定时器”的程序设计与调试*代码.zip
- Deeper.dmg.zip
- PlotFilter / 滤波器系数文件:PlotFilter 绘制滤波器响应。 过滤器文件包括 ITU-T 过滤器和 QMF 过滤器。-matlab开发
- rs-popover:佳能弹出式视窗的Angular指令
- 电子功用-家庭能量动态分配路由器、方法及家庭能量发电计划方法
- pitches:这是一个网络平台,允许用户查看,提交和评论一分钟音高的各种类别。此站点允许用户查看各种音高并明智地使用它们,因为仅需一分钟即可打动他人
- 玩hangmangame
- UserPrefs2020.rar
- binary_trees:关于二叉树结构的项目
- Resume-Builder-Web-Application
- 第八届 蓝桥杯嵌入式设计与开发项目决赛——频率控制器的功能设计与实现·代码.zip
- GFH:使bepo-xxerty定制键盘在GitHub上工作
- google-drive-cleaner:用于删除Google云端硬盘中文件的工具
- k8s:Hello world k8s
