KUKA机器人与PC以太网Socket通信教程
"该资源是关于KUKA机器人与PC机之间通过以太网Socket通信的详细教程,作者为王龙,整理时间为2013年4月18日。内容涵盖Socket通信基础、KUKA机器人简介、连接设置过程以及KUKA机器人的设置步骤。"
KUKA机器人与PC机的通讯控制是一项关键技术,尤其在自动化生产环境中,能够实现精准的远程监控和指令传输。本教程提供的方法是基于以太网Socket通信,这是一种广泛应用的网络通信协议,允许不同设备间通过TCP/IP协议进行数据交换。
Socket介绍
Socket,即套接字,是应用程序与网络协议交互的接口,它将复杂的网络协议封装在简单易用的API下。Socket通信通常包括客户端和服务器端,两者通过IP地址和端口号建立连接,进行双向数据传输。Socket框图描绘了这一通信模型,客户端与服务器通过Socket接口与TCP/IP协议族进行交互。
KUKA机器人介绍
KUKA机器人是全球知名的工业机器人制造商,以其先进的技术和广泛的适用性著称。KUKA机器人控制系统搭载Windows XP,配备多种接口,便于与其他设备集成。在降低成本的考虑下,本教程选择了以太网作为与FZ4或其他设备通信的方式。
连接设置过程
设置KUKA机器人与PC通信的关键步骤包括硬件连接、配置KUKA机器人和配置PC。首先,通过以太网线将PC与KUKA机器人相连,确保两者的网络配置在同一局域网内。在KUKA机器人端,配置相应的网络参数,而在PC端,可以使用SocketTool_V2.3.EXE这样的模拟软件来测试和建立连接。
KUKA设置过程
KUKA机器人的设置主要包括硬件连接和编程。硬件上,需要正确连接以太网线,并确保PC的IP地址(如192.168.2.5)与KUKA机器人的IP地址在同一子网内。编程方面,需要在KUKA的控制系统中编写相应程序,以响应来自PC的Socket请求并执行相应的动作。
通过以上步骤,用户可以实现KUKA机器人与PC之间的有效通讯,从而实现远程控制、数据交换等功能。这对于自动化生产线的设计、调试和维护具有重要意义,可以提高工作效率,减少人工干预,同时增强系统的灵活性和可靠性。
共通技术整理之 KUKA 机器人以太网 Socket 通信
共 7 页 第 1 页
KUKA 机器人以太网 Socket 通信
摘 要:本文主要讲述了 KUKA 机器人,基于以太网 Socket 通信的建立过程,通信建立后,
可与 FZ4,PLC(如 CP1L-EM),以太网模块(ETN21),PC 等设备之间通信。
关 键 词:KUKA、Socket、FZ4
整理时间:2013-04-18
整 理 人:王 龙
-------------------------------------------------------------------------------------------
一、 概述:
1.1 Socket 介绍
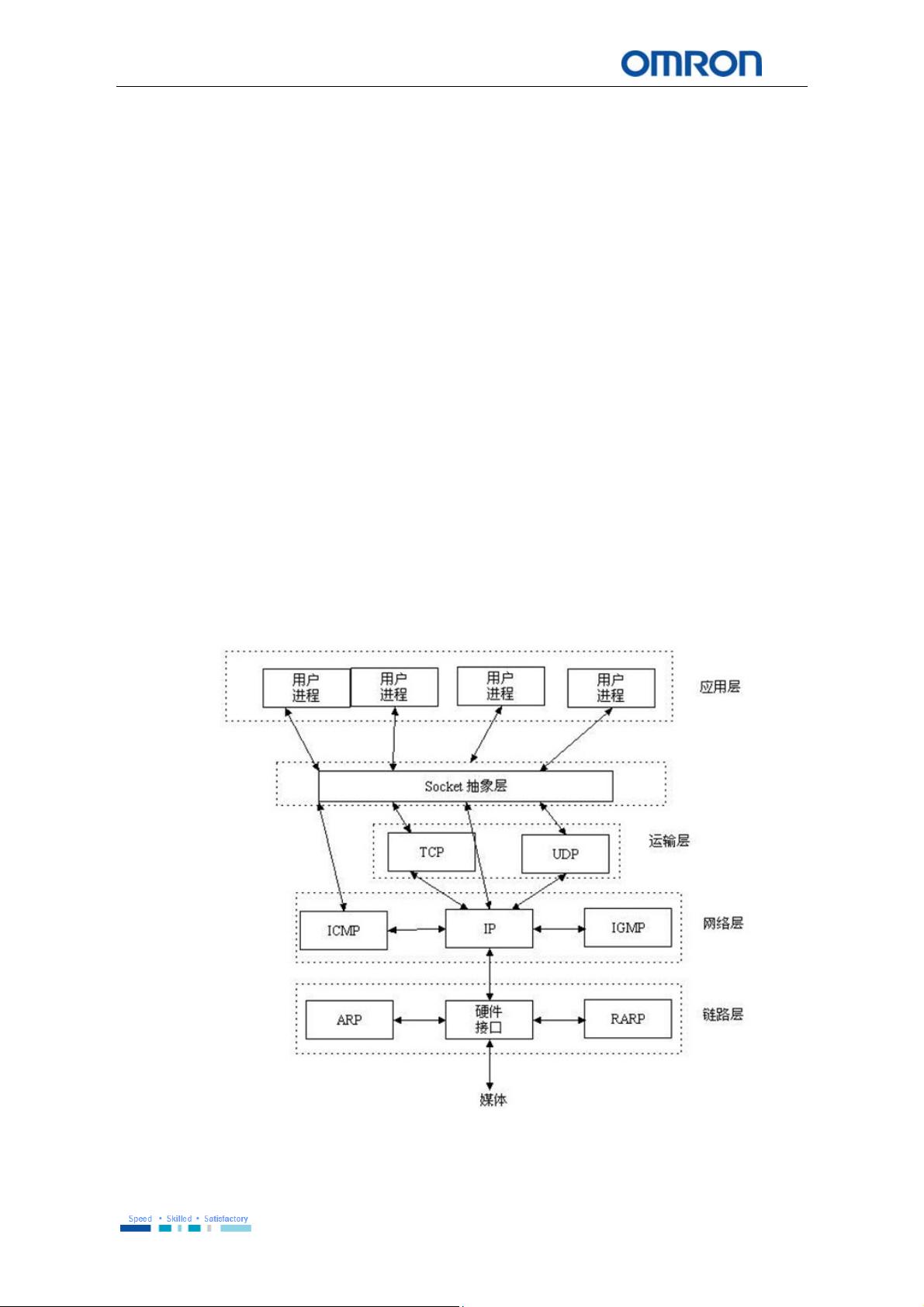
Socket 是应用层与 TCP/IP 协议族通信的中间软件抽象层,它是一组接口。在设计模式中,Socket
其实就是一个门面模式,它把复杂的 TCP/IP 协议族隐藏在 Socket 接口后面,对用户来说,一组
简单的接口就是全部,让 Socket 去组织数据,以符合指定的协议。Socket 框图如图 1 所示:
图1 Socket框图
下载后可阅读完整内容,剩余6页未读,立即下载
1859 浏览量
1039 浏览量
173 浏览量
218 浏览量
2021-10-07 上传
2018-05-02 上传
109 浏览量
点击了解资源详情

toby13
- 粉丝: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 桌面玫瑰恶搞小程序,带给你不一样的开心惊喜
- Win7系统语言栏无法显示?一键修复解决方案
- 防止粘贴非支持HTML的Quill.js插件
- 深入解析:微软Visual C#基础教程
- 初学者必备:超级玛丽增强版源码解析
- Web天气预报JavaScript插件使用指南
- MATLAB图像处理:蚁群算法优化抗图像收缩技术
- Flash AS3.0打造趣味打地鼠游戏
- Claxed: 简化样式的React样式组件类
- Docker与Laravel整合:跨媒体泊坞窗的设置与配置
- 快速搭建SSM框架:Maven模板工程指南
- 网众nxd远程连接工具:高效便捷的远程操作解决方案
- MySQL高效使用技巧全解析
- PIC单片机序列号编程烧录工具:自动校验与.num文件生成
- Next.js实现React博客教程:日语示例项目解析
- 医院官网构建与信息管理解决方案
