




高速自动驾驶车辆的地形适应模型预测控制
需积分: 9 28 浏览量
更新于2024-07-16
收藏 2.14MB PDF 举报
本文探讨了高速自动驾驶地面车辆(AGVs)的模型预测控制(Model Predictive Control, MPC)稳定化策略,特别关注路面地形的影响。作者 Kai Liu、Jianwei Gong等人来自北京理工大学的智能车辆研究中心,他们提出了一种新型的控制方案,旨在处理道路曲率和侧倾角带来的复杂动态特性,确保AGV在高速行驶时保持良好的操控稳定性,防止过度侧滑和翻滚,同时避免碰撞。
该研究首先构建了一个考虑单轮滚动动力学的动态模型,考虑了车辆与路面之间的交互,这包括道路的弯道曲率和侧坡角度。为了实现长期的碰撞规避并保持短期预测精度,研究人员采用了可变时间步长对车辆模型进行离散化。这样做的好处在于能够在保证安全行驶的同时,优化车辆的路径规划。
为了保证车辆的操控性能和障碍物避障,研究者开发了一系列的安全约束条件,如侧滑极限、零动点(Zero-Moment Point, ZMP)以及横向安全走廊。这些约束被纳入到MPC问题中,通过每次步骤的优化计算,确定出最佳的转向控制指令。这样做的目标是实现高效、精确且实时的驾驶决策。
此外,为了补偿模型中的未建模动态和参数不确定性,文章还引入了反馈校正机制。这种方法增强了控制器的鲁棒性,确保在实际运行环境中也能保持稳定的性能。研究结果通过Matlab/CarSim环境进行了模拟验证,结果显示提出的控制策略在高精度和实时性方面表现出色。
总结来说,这项工作在高速自动驾驶领域具有重要意义,不仅提高了AGV的操控性能,还展示了MPC在高级驾驶员辅助系统(Advanced Driver Assistance Systems, ADAS)和智能交通系统(Intelligent Transportation Systems, ITS)中作为安全技术的应用潜力。通过综合考虑路面地形和动态模型,本文为实现更安全、高效的自动驾驶提供了理论支持和技术路线。
Appl. Sci. 2018, 8, 822 4 of 16
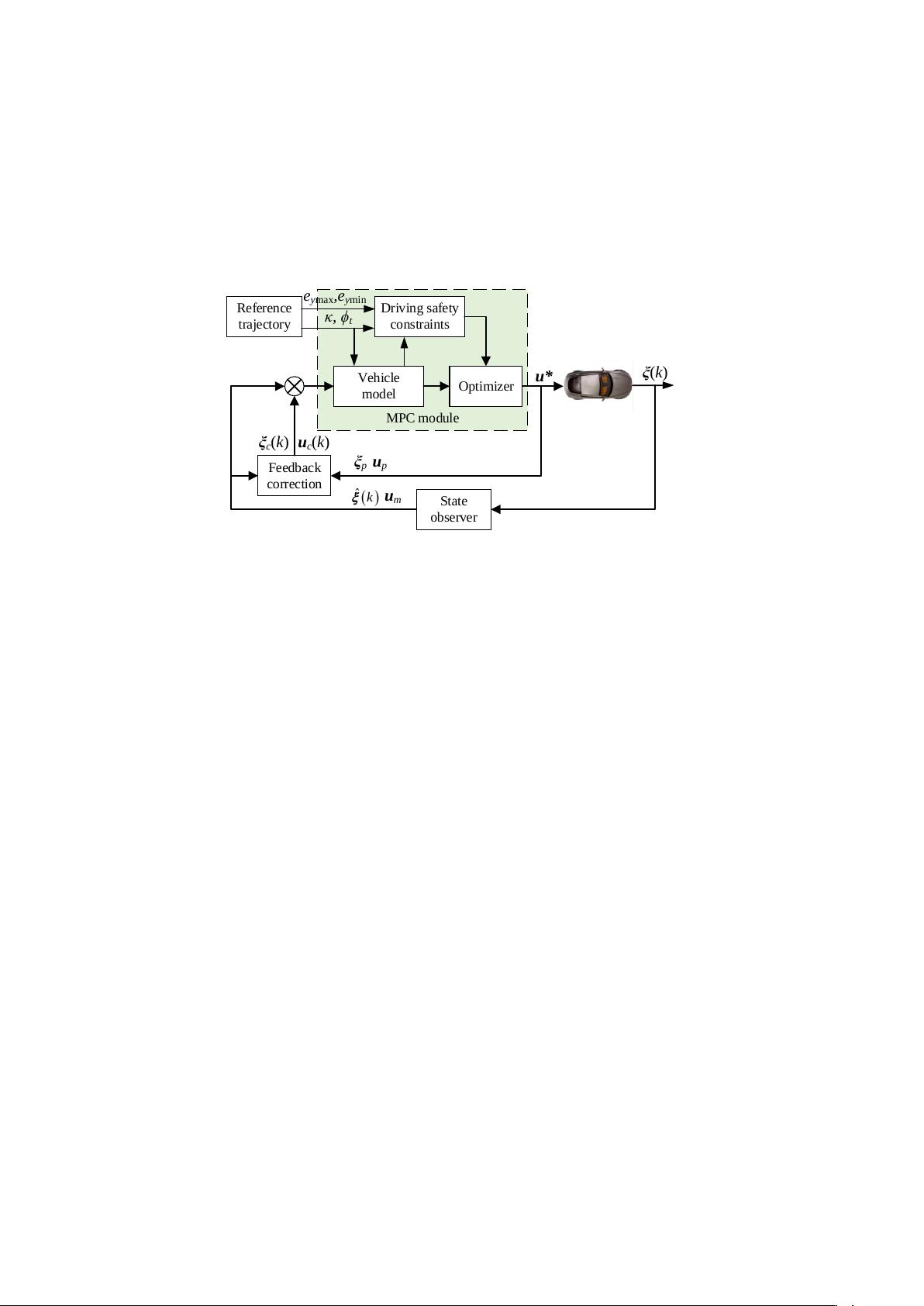
estimated state
ˆ
ξ
k
and the measured control action
u
m
together with the
u
c
and
ξ
c
obtained from the
feedback correction module are used to generate modified vehicle state
ξ
k
=
ˆ
ξ
k
+ k
1
∗ ξ
c
and modified
control input
u
k
= u
m
+ k
2
∗ u
c
, where
k
1
,
k
2
are integral coefficients. Accordingly, the vehicle model is
developed while accounting for the road curvature
κ
and bank angle
φ
t
. Then, safe driving constraints
are designed to prevent sideslips, rollovers and exceeding road boundaries. Finally, an MPC problem
is formulated and solved to generate the optimal control sequence u
∗
.
Driving safety
constraints
ξ
p
ξ(k)
MPC module
ˆ
k
u
p
u
c
(k)
Vehicle
model
Optimizer
Reference
trajectory
Feedback
correction
State
observer
u
m
u*
ξ
c
(k)
κ, ϕ
t
e
ymax
,e
ymin
Figure 2. Framework of the proposed MPC scheme.
3. Vehicle Dynamics Modeling and Discretization
3.1. Dynamics Modeling
For a high-speed AGV, the vehicle generally steers with a large radius and small front steering
angle. Therefore, the track width is neglectable with respect to its cornering radius. Thus, it is
reasonable to use a spatial single-track vehicle model, as shown in Figure 3. The vehicle dynamics can
be expressed as [21]:
m
˙
v
x
=a
x
+ mv
y
ω
z
− m
s
h
sr
ω
z
ω
x
(1a)
m
˙
v
y
=a
y
− mv
x
ω
z
− mg sin
(
φ
t
)
+ m
s
h
sr
˙
ω
x
(1b)
I
z
˙
ω
z
=
l
f
F
y f
− l
r
F
yr
(1c)
˙
φ
r
=ω
x
(1d)
I
x
˙
ω
x
=m
s
h
sr
(
˙
v
y
+ v
x
ω
z
) + m
s
gh
sr
sin
(
φ
)
− M
R
(1e)
where
a
x
= (F
x f
+ F
xr
− F
R
)/m
,
F
x f
,
F
xr
are the longitudinal forces at the front/rear tire,
F
R
represents the dissipative forces, including aerodynamic drag force, rolling resistance
friction force, etc.,
a
y
= (F
y f
+ F
yr
)/m
,
F
y f
,
F
yr
are the lateral forces at the front/rear tire,
M
R
= K
φ
φ
r
+ D
φ
ω
x
, K
φ
and D
φ
are the suspension roll damping and stiffness,
m
is the total vehicle
mass,
m
s
is the sprung mass,
ψ
and
ω
z
are the yaw angle and yaw rate,
h
sr
is the height of the sprung
mass from the roll center,
l
f
,
l
r
are the distances from the CoG to the front and rear axle along the
vehicle’s
x
-axis,
g
is the gravitational acceleration,
v
x
,
v
y
are the longitudinal and lateral velocities of
the CoG and
φ
r
,
ω
x
and
˙
ω
x
are the roll dynamics (angle, rate and acceleration) of the sprung mass,
respectively.
φ
t
is the road bank and assumes
˙
φ
t
≈
0,
φ
r
is the roll angle of the sprung mass to the
vehicle’s
z
-axis.
φ = φ
t
+ φ
r
,
I
z
is the moment of inertia about the vehicle’s
z
-axis.
I
x
is the moment of
inertia of the sprung mass with respect to the roll center. The cross products of the mass moment of
inertia are neglected.
下载后可阅读完整内容,剩余15页未读,立即下载
120 浏览量
205 浏览量
点击了解资源详情
2021-03-18 上传
115 浏览量
1254 浏览量
752 浏览量
174 浏览量
2019-06-22 上传

leoking99
- 粉丝: 1
 我的内容管理
展开
我的内容管理
展开








最新资源
- Komodo IDE 9.0.0-87165 安装及激活指南
- VS2010绝美配色方案深度揭秘
- 使用lucene.rar实现TXT/PDF/XML/HTML文件高效检索
- C#程序开发范例宝典第11章:打印与报表设计技巧
- JavaScript Hackathon活动总结与代码解析
- C#打造简易视频播放器及监控应用
- C#实现UPNP TCP网络穿透技术指南
- EDiary 2.53:安全便捷的电子日记软件
- 掌握PHP项目开发:10个经典实例详解
- 掌握JUnit:回归测试框架的编程与实践
- Java初学者必看的NIIT培训笔记
- Unigui17001489版本汉化与技术解析
- 深入浅出JavaScript学习之道
- ModelSim SE 6.6 免费破解及安装指南
- 探索SQL Server 2014 AdventureWorks数据库实例
- KINECT与MS SDK、OpenNI集成桥接工具V1.6.0.0发布






















