CPLD驱动的高效步进电机控制器设计与应用
需积分: 10 56 浏览量
更新于2024-09-06
1
收藏 167KB PDF 举报
本文主要探讨的是基于CPLD(复杂可编程逻辑器件)的步进电机控制器设计。CPLD作为一种灵活的数字逻辑平台,被选作核心器件,其在设计中的关键作用在于能够集成大量的逻辑功能,从而显著减少外围元器件的需求。这种设计的优势在于系统具有出色的扩展性,可以轻松适应不同的应用需求,同时保持高度的可靠性和抗干扰能力。步进电机控制器的设计目标是实现步进电机的高效、精确控制,包括速度调节、快速响应和切换方向等功能。
作者王海华和宋蕾来自辽宁科技大学电信学院,他们强调了CPLD步进电机控制器在减少CPU占用时间和易于高速控制方面的优势,这使得系统能够在不影响主处理单元性能的情况下实现高性能操作。CPLD的并行处理特性使得系统设计更为简洁,成本较低,适合于自动化设备和工业环境中广泛应用的步进电机系统。
设计过程中,他们采用先进的VHDL语言进行软件编程,借助EDA(电子设计自动化)工具进行编译、优化、综合和仿真,实现了数字化的步进电机控制,使得系统设计更加高效且易于调试。系统外围电路设计考虑到了CPLD和VHDL语言的优势,确保了系统的稳定性和通用性,即使在面对复杂或变化的需求时也能方便地进行功能升级或扩展。
前言部分介绍了步进电机的广泛应用以及其控制系统的重要性,特别提到了基于CPLD的控制器在简化电路结构、增强系统性能上的显著作用。文章接下来详细阐述了系统的设计方案,包括输入时钟处理、控制逻辑实现、以及如何利用CPLD的灵活性来满足不同应用场景的需求。
总结来说,这篇文章深入研究了CPLD在步进电机控制器设计中的关键作用,展示了其在简化设计、降低成本、提升性能和扩展性方面的价值,为实际工程中的步进电机控制系统提供了创新的解决方案。
基于 CPLD 的步进电机控制器设计
王海华,宋蕾
辽宁科技大学电信学院 114051
摘要:本文设计了一种基于CPLD的步进电机控制系统。它以CPLD作为核心器件,极大地减少了外围元件的
使用。具有系统扩展性能好、可靠性高、抗干扰能力强、结构简单、成本低廉,不占用CPU时间、易于高速
控制等优点。
关键词:步进电机,控制器,CPLD
中图分类号:TP393 文献标识码:A
The designing of the stepper motor controlled by the CPLD
Wang Haihua ,Song Lei
University of Science and Technlogy Liaoning 114044
Abstract:This paper devices a kind of control system of the stepper motor based upon CPLD. As the core of the
device, CPLD implements the most logic functions and minimizes the peripheral components. The distinctive
advantages of the system are expandable, stable, simple, lowly-cost and changing functions on system without
occupying CPU time etc.
Keywords:Stepping motor,Controller,CPLD
1、前言
步进电机可在宽广的频率范围内通过改变脉冲频率实现调速、快速起停、正反转控制等,
由其组成的开环系统简单、可靠,因此它被广泛的运用于数控机床、自动记录仪、工业机器
人、无损检测等系统中,步进电机的性能很大程度上取决于其控制系统
[1]
。基于CPLD的步
进电机控制系统
[2]
具有I/O端口多,可自由编程定义其功能等特点,大大缩减了电路的体积、
提高电路的稳定性。先进的开发工具使整个系统的设计调试周期大大缩短。利用VHDL语言
进行软件编程,通过EDA设计软件对程序编译、优化、综合、仿真、适配,可以对步进电
机控制实现数字输入。系统外围电路设计相对简单、可靠,且鉴于CPLD和VHDL语言自身
的特点,系统具有较好的扩展性,在控制系统中也具有一定的通用性。
2、系统设计方案
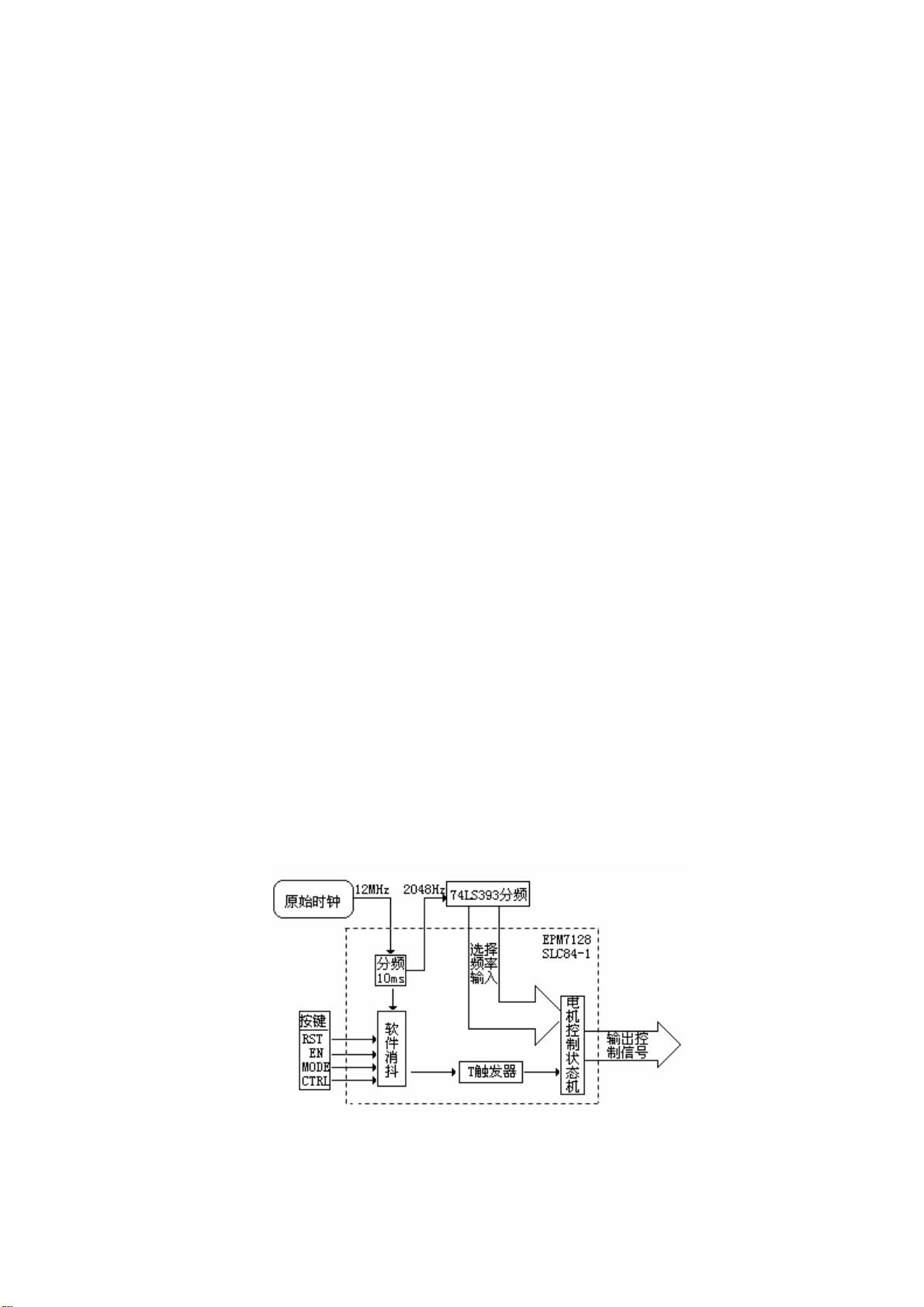
如图 1 所示。首先输入原始时钟信号,经过分频器得到 10ms 按键判断周期和频率为
2048Hz 的时钟信号,2048Hz 的信号经过外部硬件分频以后输入芯片,作为电机的转速信号。
由按键输入四个控制信号,和电机的转速频率信号一起送入电机控制状态机,由状态机根据
不同的输入来选择电机输出控制信号。
图 1 系统设计框图
3、系统硬件设计
下载后可阅读完整内容,剩余4页未读,立即下载
2019-09-12 上传
2021-07-13 上传
2024-05-30 上传
2023-11-21 上传
2023-06-05 上传
2024-01-24 上传
2023-07-07 上传
2023-08-08 上传
2024-05-19 上传

weixin_38743968
- 粉丝: 404
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Android圆角进度条控件的设计与应用
- mui框架实现带侧边栏的响应式布局
- Android仿知乎横线直线进度条实现教程
- SSM选课系统实现:Spring+SpringMVC+MyBatis源码剖析
- 使用JavaScript开发的流星待办事项应用
- Google Code Jam 2015竞赛回顾与Java编程实践
- Angular 2与NW.js集成:通过Webpack和Gulp构建环境详解
- OneDayTripPlanner:数字化城市旅游活动规划助手
- TinySTM 轻量级原子操作库的详细介绍与安装指南
- 模拟PHP序列化:JavaScript实现序列化与反序列化技术
- ***进销存系统全面功能介绍与开发指南
- 掌握Clojure命名空间的正确重新加载技巧
- 免费获取VMD模态分解Matlab源代码与案例数据
- BuglyEasyToUnity最新更新优化:简化Unity开发者接入流程
- Android学生俱乐部项目任务2解析与实践
- 掌握Elixir语言构建高效分布式网络爬虫
