模糊控制在智能车调速系统设计中的应用
需积分: 3 86 浏览量
更新于2024-12-31
收藏 531KB PDF 举报
"基于模糊控制的智能车调速系统的设计.pdf"
本文主要探讨的是基于模糊控制的智能车调速系统的开发,这种系统利用模糊逻辑来优化车辆速度的调节,以实现更精确、更智能的驾驶控制。模糊控制是一种非传统的控制方法,它借鉴了人类决策过程中的模糊性和不确定性,将复杂的控制问题转化为易于处理的规则集合。
在智能车调速系统中,模糊控制器通常由几个关键部分组成:输入变量处理、模糊化、模糊推理和反模糊化。输入变量处理涉及将实际的传感器数据(如车速、路况等)转换成适合模糊逻辑处理的形式。模糊化是将这些连续的实值映射到模糊集的概念上,例如“快”、“慢”等模糊语义。模糊推理则根据预定义的模糊规则库进行,这些规则通常表述为如果“车速是快的”,那么“应该减小油门”。最后,反模糊化将推理结果转换回实际的控制输出,如调整电机的转速。
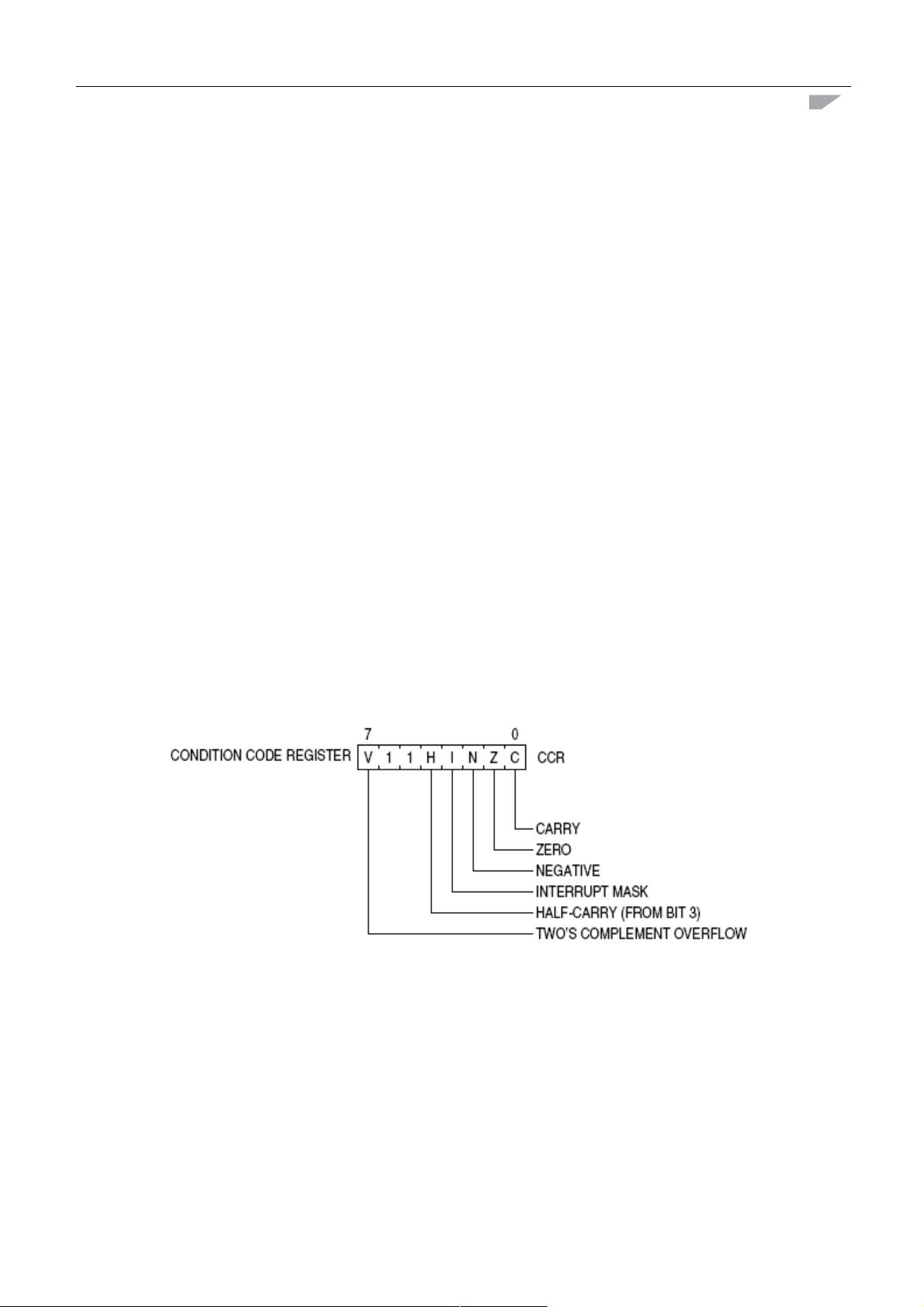
HCS08系列微控制器在智能车调速系统中扮演着重要角色。HCS08是一款由Freescale Semiconductor(现为NXP半导体的一部分)生产的微控制器,专为低功耗应用设计。它内嵌有高性能的CPU,如M68HC08核心,提供了丰富的外设接口和内存资源,能够高效地处理模糊控制算法所需的计算任务。
文档中提到,HCS08微控制器具有64K字节的程序存储器和16K字节的数据存储器,以及多种I/O端口和定时器/计数器,这使得它能够灵活适应不同的控制需求。其内部结构包括一个强大的指令集,支持实时运算,这对于模糊控制系统的快速响应至关重要。此外,微控制器还提供了中断系统和电源管理功能,以适应智能车在不同环境和条件下的运行。
模糊控制的优势在于其适应性和鲁棒性,它能够在不确定性和复杂环境下保持稳定性能,这对于智能车在多变的道路和交通条件下行驶尤其重要。通过不断地学习和调整模糊规则,系统能够逐渐优化其控制策略,从而提高智能车的驾驶安全性和舒适性。
基于模糊控制的智能车调速系统设计是利用先进的控制理论解决实际工程问题的一个实例,它结合了硬件(如HCS08微控制器)和软件(模糊控制算法)的优势,为实现自主驾驶和智能交通系统提供了有力的技术支撑。
#
c`fV7AY=ìÛM'32.0(decdeí:À]Uî* #
$%&`abhicïjkí:qh*gY=ØdeußìÉëðEuñò
`gógô{õöñò`*2'5def(5W7AcY*
yо¿udegô{õö~÷øù~÷ab
q6ÜLM 23]Ìcg9¡q,..ëðt¿]Ìcúûügýõ
ØqþW*Ûc'¤`(:*'ÁþW,..(
Uî'Ìcdef(µq6Ü 23 qïÝIÎÏdef«c7#]
ëðg¾u6
ëðyµA cÀø7AÆwxy`
¿ëðé¯b7øÆÇwxyëðyì57VÛZc
æ~?góñòwxëðy5Â`´µ7AÛcÐ567
Ìcbëðy5Âc8...98....ÌcöZ]öµÌc°±ÛÈé
¯r7`
c'./Àgó'2(A鯣1rr c q²
!H"#6'./c¬I$%7& c
!"#$%&'()*q:
剩余19页未读,继续阅读
1695 浏览量
1695 浏览量
1363 浏览量
2023-12-18 上传
2021-09-27 上传
259 浏览量
543 浏览量
2021-09-13 上传
2010-11-27 上传

SoulKeeer
- 粉丝: 10
 我的内容管理
展开
我的内容管理
展开







最新资源
- 网狐工具:核心DLL和程序文件解析
- PortfolioCVphp - 展示JavaScript技能的个人作品集
- 手机归属地查询网站完整项目:HTML+PHP源码及数据集
- 昆仑通态MCGS通用版S7400父设备驱动包下载
- 手机QQ登录工具的压缩包内容解析
- Git基础学习仓库:掌握版本控制要点
- 3322动态域名更新器使用教程与下载
- iOS源码开发:温度转换应用简易教程
- 定制化用户登录页面模板设计指南
- SMAC电机在包装生产线应用的技术案例分析
- Silverlight 5实现COM组件调用无需OOB技术
- C#实现多功能画图板:画直线、矩形、圆等
- 深入探讨C#语言在WPF项目开发中的应用
- 新版2012109通用权限系统源码发布:多角色用户支持
- 计算机科学与工程系网站开发技术源码合集
- Java实现简易导出Excel工具的开发教程
