Simulink中的连续扫频模型辨识方法解析
需积分: 14 22 浏览量
更新于2024-08-04
收藏 2.09MB PDF 举报
"本文主要介绍了如何使用Simulink进行连续扫频的模型辨识方法,适用于连续系统的模型构建。文章详细阐述了从设置变频正弦激励到利用系统辨识工具箱获取传递函数的全过程,并提供了关键步骤的图示说明。"
在控制系统的设计和分析中,模型辨识是一个关键步骤,它涉及到对系统动态特性的理解和建模。Simulink作为一种强大的仿真工具,提供了便捷的模型辨识功能。本文主要讨论的是如何利用Simulink进行连续扫频的模型辨识。
首先,连续扫频相比于单点扫频具有操作简便的优势,无需对每个频率点进行单独的曲线拟合。通过自定义的变频正弦激励,可以更直观地观察系统响应。这种激励方式使得输入信号的频率随时间变化,从而得到一系列不同频率下的系统响应数据。
文章的理论基础是通过变频正弦信号作为输入,对输出信号进行快速傅里叶变换(FFT),从而获取幅值比和相位差。这些参数是构建系统传递函数的关键。图1展示了系统辨识的基本流程,即通过输入输出信号的FFT分析得到关键参数,再借助Simulink的系统辨识工具箱构建模型。
在实际操作中,首先要设定一个假设的被控对象的传递函数,如二阶系统的例子。接着,建立Simulink扫频模型,设置合适的系统步长和求解器。模型中,需要配置“MATLABFunction”模块来生成随时间变化的正弦信号。图2和图3展示了模型结构和求解器设置。
然后,利用“toWorkspace”模块将输入输出数据保存,以便后续的数据处理。在MATLAB环境中,编写M语言脚本来执行FFT分析,得到幅值比和相位差。这些数据随后导入到SystemIdentification模型工具箱中,通过频域数据(Freq.domaindata)导入,绘制Bode图以可视化模型性能。
图5和图6展示了SystemIdentification模型工具箱的界面以及输入数据后的Bode图绘制。正确解读Bode图对于评估模型辨识的准确性至关重要。需要注意的是,频率单位通常是弧度/秒(rad/s),而相位差单位通常为度(deg)。
总结来说,利用Simulink进行连续扫频的模型辨识是一种实用且高效的方法,它简化了数据处理和模型构建的过程。通过对系统动态特性的精确描述,能够为控制系统的优化设计提供有力支持。
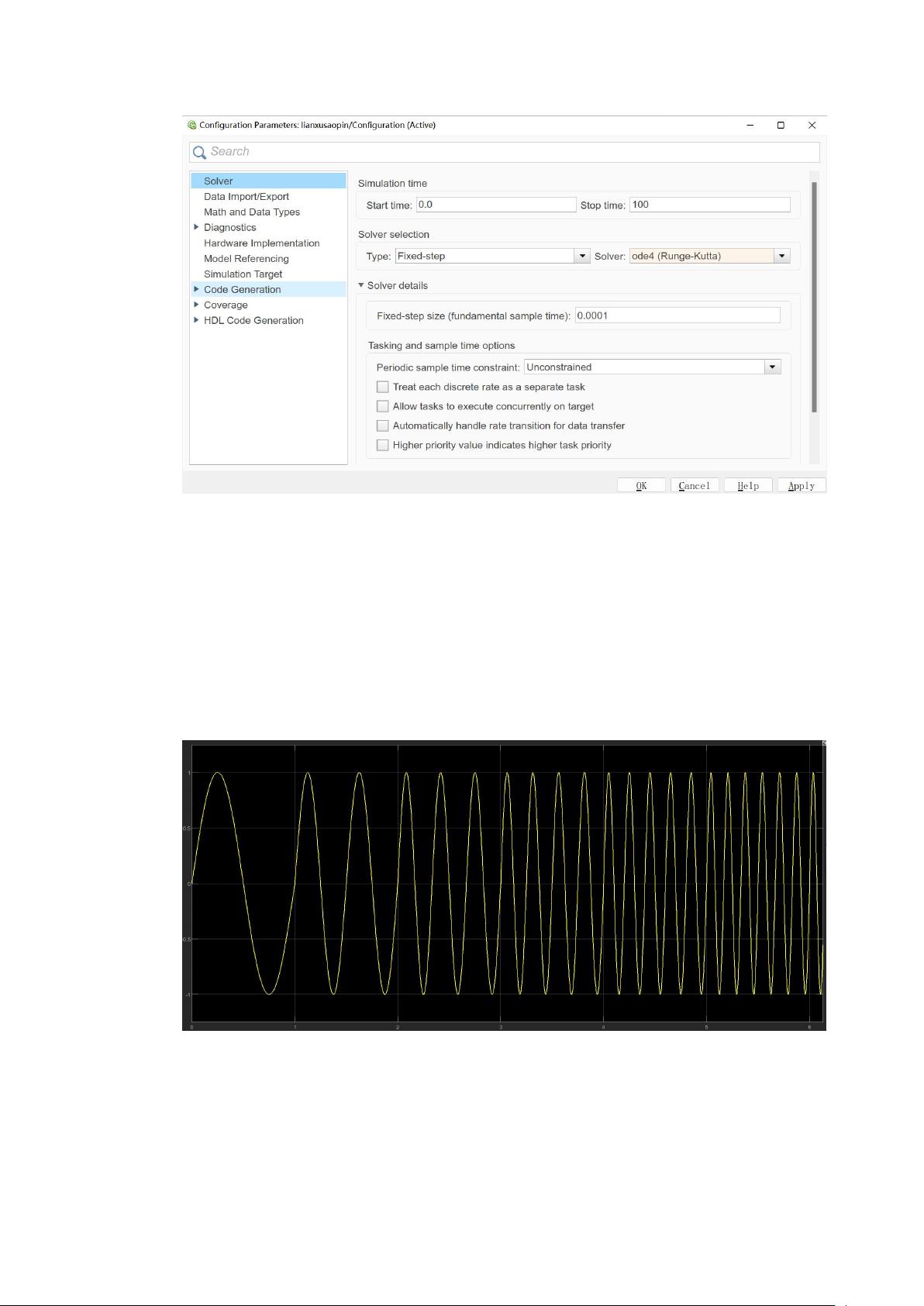
图 3 模型求解器设置图
并将输入信号和输出信号用“to Workspace”模块将数据实时保
存至“Workspace”中便于下一步操作。
步骤三:利用“MATLAB Function”模块编写“变频”正弦信号,
使得正弦信号每 1 秒钟增加 1Hz。
图 4 正弦“变频”曲线
步骤四:对导入 Workspace 里的 In、Out 数据进行 FFT 分析,并
得到幅值比、相位差。此部分需要编写数据处理的 M 语言,具体在
剩余10页未读,继续阅读
580 浏览量
1875 浏览量
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

Erick_Chiang
- 粉丝: 10
 我的内容管理
展开
我的内容管理
展开







最新资源
- webacus工具实现自动页面生成与报表导出功能
- 深入理解FAT32文件系统及其数据存储与管理
- 玛纳斯·穆莱全栈Web开发学习与WakaTime统计
- mini翼虎播放器官方安装版:CG视频教程全能播放器
- CoCreate-pickr:轻便的JavaScript选择器组件指南与演示
- 掌握Xdebug 5.6:PHP代码调试与性能追踪
- NLW4节点项目:使用TypeORM和SQLite进行用户ID管理
- 深入了解Linux Bluetooth开源栈bluez源代码解析
- STM32与A7105射频芯片的点对点收发控制实现
- 微信高仿项目实践:FragmentUtil使用与分析
- 官方发布的CG视频教程播放器 mini翼虎x32v2015.7.31.0
- 使用python-lambder自动化AWS Lambda计划任务
- 掌握异步编程:深入学习JavaScript的Ajax和Fetch API
- LTC6803电池管理系统(BMS)经典程序解析
- 酷音传送v2.0.1.4:正版网络音乐平台,歌词同步功能
- Java面向对象编程练习:多态在游戏对战模拟中的应用
